Velociraptor (W)

Fall 2016 Velociraptor (W): Material Trade-Off Study
By Aaron Choi (Manufacturing Engineer) Approved by Tim Haddadian (Manufacturing Division Manager) and Lam Nguyen (Project Manager) Table of Contents Requirements Level 1-1 The 3rd generation Velociraptor (W) budget shall not cost more than $102. This estimate is based upon the customer and project team agreement on October 7th, 2016. Introduction For the materials, cost […]

Fall 2016 Velociraptor (W): Requirements
By: Gifty Sackey (Mission, System and Test Engineer) Approved by: – Lam Nguyen (Project Manager) – James Lee (Division Manager for Mission, System and Test) Level 1 Requirements The 3rd generation Velociraptor (W) budget shall not cost more than $102. This estimate is based upon the customer and project team agreement on October 7th, 2016 The […]
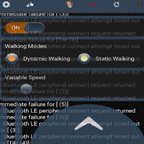
Fall 2016 Velociraptor (W): Bluetooth Commands
By: Gifty Sackey (Mission, System and Test) Approved by: – Lam Nguyen (Project Manager) – James Lee (Division Manager for Mission, System and Test) Introduction This blog post will be discussing velociraptor’s communication system; the ArxRobot app and the Arxterra Control Panel that is used to control the robot. At this point in time, the velociraptor […]

Fall 2016 Velociraptor (W): PCB Layout
By: Aaron Choi (Manufacturing Engineer) Edited and Approved by: – Lam Nguyen (Project Manager) – Tim Haddadian (Division Manager for Manufacturing Engineer) Table of Contents Requirements L 1-9 requirement states the Velociraptor shall have an external PCB with an I2C interface which will be similar to the 3DotBoard Introduction To fulfill the Level 1-9 […]
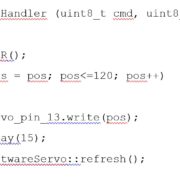
Fall 2016 Velociraptor (W): Control Algorithm #1
By: Taylor Farr (E&C) Approved by Ryan Daly (Division Manager for Electronics and Controls) Lam Nguyen (Project Manager) Table of Contents Fulfilled Requirements The Velociraptor shall statically walk. The Velociraptor should dynamically walk In order to fulfill these requirements, a software algorithm needs to be implemented that reads the rotary sensors and move the dc […]
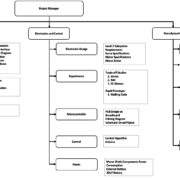
Fall 2016 Velociraptor (W) Preliminary Project Plan
By: Lam Nguyen (Project Manager) Hal Vongsahom (System Engineer) Table of Contents Work Breakdown Structure (WBS) By: Lam Nguyen (Project Manager) The Work Breakdown Structure in Figure 1 organize specific tasks to three section for the Velociraptor project. These three sections are assigned to division members in Mission, System, and Test, […]
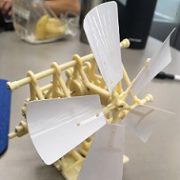
Fall 2016 Velociraptor (W): Preliminary Design Documentation
By: Lam Nguyen (Project Manager) Hal Vongsahom (System Engineer) Taylor Farr (Controls Engineer) Aaron Choi (Manufacture Engineer) Program Objective Lam Nguyen (Project Manager) The Fall 2016 Velociraptor is inspired by both the biped Titrus-III robot and the Theo Jansen biped robot. The Titrus-III was developed by the Tokyo Institute of Technology and the Theo Jansen biped […]