Hexapod
Wi-Fi Range Extender
By Chau To Introduction: Wi-Fi extender or Wi-Fi booster is a device that picks up a wireless signal and then rebroadcasts that signal. It acts as a second access point for other devices to connect to. The range of a typical Wi-Fi extender is around 300ft. Some expensive Wi-Fi boosters can achieve a range of […]
Smart Phone Hotspot
By Mevan Fernando and Robert Licari Introduction by Mevan Fernando Tethering is when a smartphone is turned into a mobile Wi-Fi hotspot and its 3G/4G data connection is shared. Once tethering is turned on in the smartphone, any device with a wireless connection can connect to the internet via the smartphone’s connection. Procedure by Mevan […]
Buy a Wi-Fi/4G access point
by Vinh Khoa Ton Introduction A Wi-Fi/4G access point is a location that provides users wireless network. Nowadays, most electronic devices are equipped with a wireless adapter (mobile phone, laptop, tablet, watch, etc.), the demand for wireless connection increases rapidly. The Wi-Fi hotspot could be found usually in public areas such as airports, post offices, […]
Heat and Power Problems
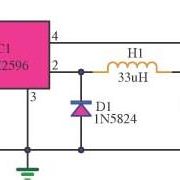
By Tien Dang Introduction Power level, power lost, and heat product are the problems that we need to maintain during testing and demoing period. To maintain the power level, we need to use a voltage regulator (https://www.arxterra.com/voltage-regulator), but power lost and heat product are always there, all we can do is deduce them to a […]

Mold Case Study
By Vinh Kim, 3D Modeling and Manufacturing Introduction: Here I did a study on Silicone rubber (Mold Max 40 vs OOMOO 30) vs. Polyurethane rubber. The Mold Max 40 was the silicone rubber the fall 2013 Hexapod team used. I want to give our regards to Ramon Luquin (Fall 2013 Hexapod Project Manager) for donating […]

How to perform a Stress Test
By Vinh Kim, 3D Modeling and Manufacturing Introduction: Here I will show you how to perform a Stress test using Solidworks and SimulationXpress Study for the Hexapod leg and bracket design to determine its maximum stress level. Leg Stress Testing: Figure 1 First, open Solidworks and open the leg design the user wants to […]
Voltage Regulator
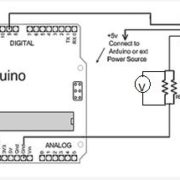
By Tien Dang Problem Statement Base on current test and calculations from discharge rate of current (available at https://www.arxterra.com/current-draw), we noticed that the battery provided 7.4V and 5000mAh, while each servo only required 6V (maximum) and 450mAh (with full load) to work. Essentially, the servos could burn without something to step down the voltage. Solution […]
Android Phone Complications with Arxterra Robot Application
By Tien Dang Introduction ArxRobot is an application for Android phone that allows users to control their robots wirelessly through Internet command (panel website: http://cp.arxterra.com/#). For this project, we will be using this application to control the Hexapod for walking sequence and traveling over objects on the testing field. Trouble download and connection In order […]

Hexapod Coding Preferences
By Chau To Introduction: This blog post will discuss some issues of the servo library (Servo.h) and how coding of the Hexapod was built including functions and subfuctions as well as some tips and troubleshooting. Note: Hexapod team drives 19 servos directly from the Arduino board (digital I/O pins), and it uses the built-in Servo.h […]
How to use STL file cutting
By Vinh Kim, 3D Modeling and Manufacturing Introduction: To print out 3D materials, the Manufacturing Division Manager Ali Etezadkhah will provide his own 3D printer that can print 5 by 8 in parts. In some cases, the 3D printer cannot print larger parts because its size is too small. In order to cut down the […]