Dimension Determination
By Juan Montano
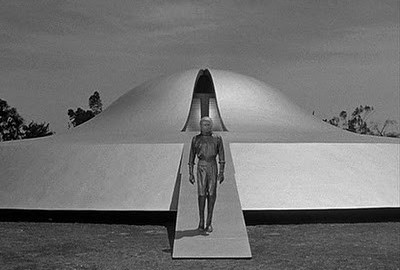
In this study, we will try to determine the appropriate dimensions for the UFO. To meet the customer’s requirement that it should look like the UFO from the movie, the day the earth stood still, we worked off of the picture (shown below) that he thought best represented the UFO from that movie.

Using that as our guide, we modified the picture, using the free drawing software called GIMP, to include the remaining parts of the UFO and to try to extract only the edges from the UFO as shown below.


Once we had that complete model, we were able to extract the measurements from the drawing itself by measuring the amount of pixels this drawing took up in for certain areas. Below we show the measured out areas.
Now to visually compare the original picture with our measured 3D model we have:
These two look approximately the same, we can increase the number of points used to get the top portion of the dome to get shape more accurately if needed.
Now that we know we have the correct shape, we will want to resize the dimensions to get realistic measured values.
We currently have:
X=length of base=477 pixels
Y=height of UFO=145 pixels
X1= length of 2nd base = 417 pixels
Y2= height of dome from 2nd base=76 pixels
Y1= height base=69 pixels
Dz= distance between curve points=45 pixels
Zi= height of curvature from 2nd base=7, 18, 45, 67, and 76 pixels
R= radius of dome=100 pixels
We will extract the ratios of lengths based on the length of the base therefore we will have:
T= total Height/length ratio:
Y/X= 145/477=0.3040
B= base 2 to dome ratio:
R*2/X1= 200/417=0.4796
YY= Height/height ratio:
Y1/Y, Y2/Y= 69/145, 76/145= .4759, .5241
RX=radius/length:
R/X= 100/477= 0.2096
Zy= ratio of height curvatures:
Z/Y2= 7/76, 18/76, 45/76, 67/76= .0921, .2368, .5921, .8816
Angle between two bases:
Arctan(Y1/((X-X1)/2))= arctan(69/30)= 66.5 degrees
Given the 50 mm fans from the customer, we would like to construct the appropriate dimensions for this UFO. To keep the same shape as the UFO, we would like to mount the fans in the relatively flat part of the second base. Therefore we have:
Fan= 53 mm (59mm at the top)
53+53mm = x1-2*R= 106mm (108mm), since we know B, we can determine X1,
X1= 106/(1-B)= 203.7 mm +/- 10mm (226.74mm)
Since we know x1, we can find the radius of the dome
R= x1*B/2= 48.8 mm +/- 10 mm (54.37mm)
Since we know R, we can find the Base/total length of the ufo:
X= R/RX= 233.03 mm +/- 10 mm =9.17 inches (259.39mm =10.21in)
Since we know X, we can find the heights of this UFO, which we get:
Y= X*T= 70.84 mm +/- 10 mm (78.86mm)
Y1=Y*yy1= 33.71 mm +/- 10 mm (367.53mm)
Y2= Y*yy2= 37.13 mm +/- 10 mm (41.33mm)
Since we know Y2, we can find the ratio of height curvatures:
Zi= Y2*Zy= 3.41, 8.79, 21.98, 32.73 mm +/- 5 mm (3.8,9.7,24.47,36.43mm)
Thus now we have all the dimensions we need to create this 3D model.
Appendix A:
The requirement of landing on the hand was considered previously. In consideration of the future, which may change the fans, here is a brief discussion on the dimensions using that requirement:
To land on one’s hand, the base of the UFO must be proportional to the size of the customer’s hand. Using the average hand size for a male, 189×84 mm, and assuming the UFO would be lightweight (as determined by the Number of Fans test, no more than 1104g), the UFO would be reasonably land on the hand as long as the diameter is no larger than 1.5xsize of the hand.
1.5×189=283.5 mm (UFO diameter based on hand length)
1.5×84= 126 mm (UFO diameter based on hand width)
Taking the average of the two above would yield 204.8 +/- 20 mm (8.06 in) UFO max length. Once we know the diameter of the UFO, the rest would follow using the ratios mentioned above.
Thus, we determined the dimensions of this UFO, however, there is a safety issue in considering the fans. Using the provided 50 mm fans, part of the fans would be in the way, making it unable to land on one’s hand. We can resolve that issue by making it larger, however, that would also not land on one’s hand reasonably (it would become a balancing act). Besides switching out the fans with some smaller fans, there are two methods we will mention to try to resolve this issue.
Our first idea would be to separate the fans away from the area from which the UFO would land on. That is, we create two sections: land section, and fan section. Below we show an example of such a model:

The land section would have to be on the area where the center of mass is located, ensuring the UFO would land on the hand. The dimensions of that area are similar to before. The fan area would have to be separated from the land section by at least half an index finger length (average would be 4 inches for index finger length) in consideration of safety. The fan section itself, would only need to be as large as the fans themselves, the rest would follow while taking into consideration the UFO model from the movie (which the picture above does a terrible job at). We can make this separation visible only from the bottom to preserve the UFO’s original look if necessary.
Our other idea would be implement some landing gear, namely the exit. We can include an exit stair case beneath the UFO which would serve as the place where the customer would hold onto the UFO. The inclusion of landing gear (which the customer expressed a want for), would allow the UFO to land on a flat surface as well. The length of such hand held exit would have to be around the width of the hand which is 89mm. Taking into consideration the height of the UFO would be around the same, we would have to implement ways of making that shorter, however the idea behind that would look like this: