Spiderbot

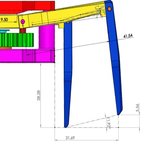
Spring 2018 3DoT Hexy: Determine Gear Design
By: Eduardo De La Cruz (Project Manager and Manufacturing Engineer) Verified by: Eduardo De La Cruz (Project Manager and Manufacturing Engineer) Approved by: Miguel Garcia (Quality Assurance) Since we are going to base our design of Spring 2016 3DoT David, we will need to implement a functional cam system that is either similar […]

Spring 2018 3DoT Hexy: RGB Color Sensors
By: Kris Osuna (Electronics & Control Engineer) Verified by: Eduardo De La Cruz (Project Manager and Manufacturing Engineer) Approved by: Miguel Garcia (Quality Assurance) A RGB sensor is going to be needed to allow 3DoT Hexy to detect intersections. A different color will be placed at every intersection to allow our robot to know […]

Spring 2018 3DoT Hexy: Decision of Movement Mechanism
By: Eduardo De La Cruz (Project Manager and Manufacturing Engineer) Approved by: Miguel Garcia (Quality Assurance) Taking into account the level 1 requirement of using only 2 micro motors to drive the movement of the robot, and by using designs from previous semesters as a reference. We as engineers had to determine the […]
Spring 2018 3DoT Hexy: Improving 3DoT David Design
By: Eduardo De La Cruz (Project Manager and Manufacturing Engineer) Approved by: Miguel Garcia (Quality Assurance) Since we decided to model 3DoT Hexy of Spring 2016’s 3DoT David, Prof. Hill recommended that we get in contact with the owner of 3DoT David to have access to the robot. Luckily, we were able to […]

Spring 2018 3DoT Hexy: 3D Print Times
By: Raymundo Lopez-Santiago (Mission,Systems, and Testing) Verified by: Eduardo De La Cruz (Project Manager and Manufacturing Engineer) Approved by: Miguel Garcia (Quality Assurance) Update: 04/17/18 After the first protype, the design was changed accordingly to fix issues identified from testing the robot (under stress). The new design has been sent to Ridwan and we […]
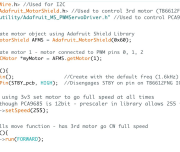
Spring 2017 SpiderBot : Firmware Blog Post
By Shaun Pasoz – Electronics & Control Engineer Introduction While waiting for the breakout boards to come in the mail, to make the best use of time the E&C division manager tasked us with coding quizzes. One of the quiz questions involved controlling the TB6612FNG motor driver using a microcontroller such as the Arduino UNO. Below […]

Spring 2017 SpiderBot : Prototyping Blog Post
By Shaun Pasoz – Electronics & Control Engineer Introduction Before sending out the PCB design for production, it is necessary to prototype the design using breakout boards and through-hole components. This is a necessary step to test the components in combination with the code and make sure the design works. The purpose of our PCB […]

Spring 2017 – SpiderBot Project Summary
Table of Contents Project Overview Executive Summary By Nicholas Jacobs – PM The purpose of SpiderBot is to make an inexpensive, fun toy that can walk, turn, launch a grappling hook, and raise/lower itself to/from a predetermined height. While anchored, SpiderBot will provide a live video feed to the Arxterra Control Panel. System Design By […]
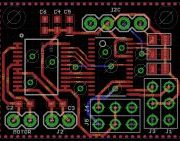
Spring 2017 SpiderBot – Custom PCB COMPLETED AND TESTED!!
By Nicholas Jacobs – Project Manager Table of Contents Introduction The 3DOT controller is a minimalist board. It comes equipped with a two channel motor driver that drives SpiderBot’s two DC motors at 5 volts, leaving nothing to drive SpiderBot’s 3.3v winch motor. Our custom PCB incorporates an additional motor driver and PWM expander that […]

Spring 2017 SpiderBot – Custom Commands Update
By Jefferson Fuentes – MST Table of Contents Requirements: The Spring 2017 Spiderbot project, S-17 Spider, shall provide a live aerial video footage for end of semester game. In addition, S-17 Spider, shall incorporate a grappling mechanism to elevate itself from the ground level. Introduction: The S-17 Spider features the ability to elevate itself […]