Spiderbot
2016 Spring 2016: 3DoT David CDR ppt and CDR Debrief
BY: Omar Mouline (Project Manager), On 04/20/2016 the the professor Gary Hill and with the assistance of the President gave us a debrief on our CDR. in the link blow is the CDR power point that was presented on the 04/06/2016 : 3DoT David CDR Table of Contents First slide: Remark: Points were deducted For […]

Spring 2016: 3DoT David Gear Instability
BY: Andrew Saprid ( Manufacturing Engineer) Introduction: By assembling the gears into the bottom plate, making the connection was going to be an issue of stability and movement for the gears. The project manager and manufacturing engineer went to Lowes to buy screws for the connection. But turns out that the holes on the bottom plate […]

Spring 2016: 3DoT David Rapid Joint Connection (Between Gear and Leg)
BY: Andrew Saprid ( Manufacturing Engineer) Introduction: The joint implemented will be lightweight and easier for the motor to operate the legs of the 3Dot David as it completes its mission. In addition, it must be able to rotate the legs for free movement. Related requirements Level 2 system requirements follow: The 3DoT David shall […]

Spring 2016: 3DoT David Servos and Motor Trade-off Study
BY: Kent Hayes (Electronics and Control) Introduction A servo is an assembly of 4 different things: a DC motor, a gear-reduction unit, a position sensing unit, and negative feedback to control the motor’s speed/position. Unlike the DC motor, servos use a 3 wire connection for the power, ground, and control. The servo receives a control signal […]

Spring 2016: 3DoT David Board Troubleshooting
BY: Christopher Hirunthanakorn (Missions, Systems and Test Engineer) Introduction: After receiving the assembled 3DoT board that my project manager (Omar) and manufacturing engineer (Andrew) put together, tests were performed to make sure the board was functional. The basic firmware was uploaded by the assembly team, so that step was skipped. More information for uploading firmware to […]

Spring 2016: 3DoT David Simulation and New Design Parts
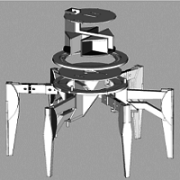
BY: Andrew Saprid ( Manufacturing Engineer) Introduction: Since the first prototype made in solidworks was difficult to 3D print, the parts had to be redesigned. They have to be as flat as possible to make it easier for the 3D print the parts. Related requirements: Level 2 system requirement follows: The 3DoT Spider shall incorporate 3D […]
Spring 2016: 3DoT Spider-Bot Mechanism Research
BY: Omar Mouline ( Project Manager) Introduction The 3Dot David project mechanical requirement was to build a small size spider bot that can walk using two motors. When the project was assigned to us, We were given The hex bug 1 in the picture below as a prototype. Related requirements The 3DoT David shall be a low […]

Spring 2016: 3DoT David Printing Time
BY: Andrew Saprid ( Manufacturing Engineer) Introduction: Calculations were done by adding the quantity to the table and adding the total amount of printing time for each part. The calculations for all the parts are then added and highlighted on each of the three tables for the total print time of all the parts. Related requirements: […]
Spring 2016: 3DoT Spider-Bot Cam Simulation
BY: Andrew Saprid ( manufacturing engineer) Introduction The initial design assumed that the CAM movement system would be used. Therefore, research on the CAM system and this CAM simulation were performed. Requirements Level 2 system requirement states: The 3DoT David shall use two micro motors for the movement system of the robot. Table of Contents CAM […]

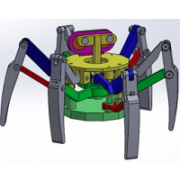
Spring 2016: 3DoT David Gear Train
BY: Andrew Saprid ( manufacturing engineer) Introduction: The mechanical system for the 3Dot David is the gear train. Gears have teeth, which are designed to make the gear train rotate 360 degrees possible. The motor will operate around 5 volts, and it will be connected to the small gear as it drives the large gear. With […]