Spiderbot
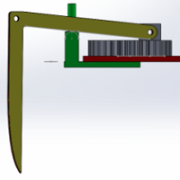
Spring 2016: 3DoT David Leg Movement Angle Study
BY: Andrew Saprid ( manufacturing engineer) Introduction: The leg must be lifted in order for the spider to walk. Supplying 5 volts will be efficient enough to lift the leg, and rotating 360 degrees continuously. Related Requirements: Level 2 system requirement states: The 3DoT David shall use two micro motors for the movement system of the […]
Spring 2016: 3DoT David Motor Driver Control
BY: Kent Hayes (Electronics and Control) Introduction: The motor driver on the 3DoT board is the Sparkfun motor driver 1A dual tb6612fng. Therefore Kent bought the actual component and began to experiment with how it will be controlling the motors. Related requirements A part of our project requirements includes the following: The 3DoT David shall compete […]
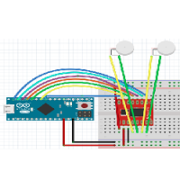
Spring 2016: 3DoT David IR Emitter/Detector Testing
BY: Kent Hayes (Electronics and Control) Introduction: In order to implement a “laser tagging” system, the electronics and control engineer conducted research and performed tests in order to see that it is possible. You can view the results of the IR Trade off Study in our blog post (insert link to blog here). Taking these results […]
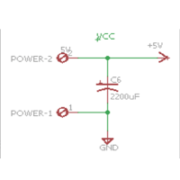
Spring 2016: 3DoT David PCB Design
BY: Kent Hayes (Electronics and Control) Introduction: In order to create the PCB for our 3DoT David, we needed to know what areas the 3DoT board would be lacking. It turns out that the board would not have a signal processing circuit for our Infrared system, a speaker, and phase detection circuit. Therefore, all we needed […]

Spring 2016: 3DoT David Arxterra Firmware Configuration
By: Chris Hirunthanakorn (Systems, Mission, and Test) Table of Contents Arxterra Firmware Configuration for 3DoT David Introduction: Because the 3DoT David is going to be controlled by the Arxterra App, the robot must use the Arxrobot Firmware that is available from here (https://github.com/arxterra/arxrobot-firmware/releases). For our particular robot, there were several things that needed to be changed […]

Spring 2016: 3DoT Spider-Bot Alternative Printing for Small Parts.
BY: Andrew Saprid ( manufacturing engineer) After building the main parts of the 3Dot David in Solidworks, they were too small to 3D print. For the moment, it is the main problem for building and assembling the model. The picture below shows the quality of the 3D printed parts compared to the original parts. Because […]

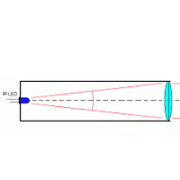
Spring 2016: 3DoT Spider-Bot IR Transmitter and Receiver Research
By: Christopher Hirunthanakorn (Missions, Systems and Test Engineer) Introduction: In order to determine which optical transmitter and detector would be the best solution for implementing the game of tag between the 3DoT David and 3DoT Goliath,, the following research on IR transmitters and detectors was done. It started with learning about the various types of transmitter and […]

Spring 2016: 3DoT Spider-Bot Preliminary Design Document.
By: Omar Mouline (Project Manager), Christopher Hirunthanakorn (Missions, Systems and Test Engineer), Kent Hayes (Electronics and Control Engineer), Andrew Saprid (Manufacturing and Design Engineer) Table of Contents The 3DoT Spider team: Omar Mouline (Project Manager) Christopher Hirunthanakorn (Missions, Systems and […]

Spring 2016: 3DoT Spider-Bot Preliminary Research Project.
Introduction to the 3DoT Spider team: Omar Mouline (Project Manager) Christopher Hirunthanakorn (Missions, Systems and Test Engineer) Kent Hayes […]

Final Project Document
By Kristine Abatay – Project Manager Matthew Clegg – Computer & Control Systems Simon Abatay – 3D Modeling & Manufacturing Before signing off with the final document for Spiderbot, we would like to thank various members of the Robot Company in aiding with the completion of Spiderbot: First off, […]