Proposal Bot/Spring/2020
Omnidirectional Motion Analysis
Author/s: Tyler Galgas
Introduction
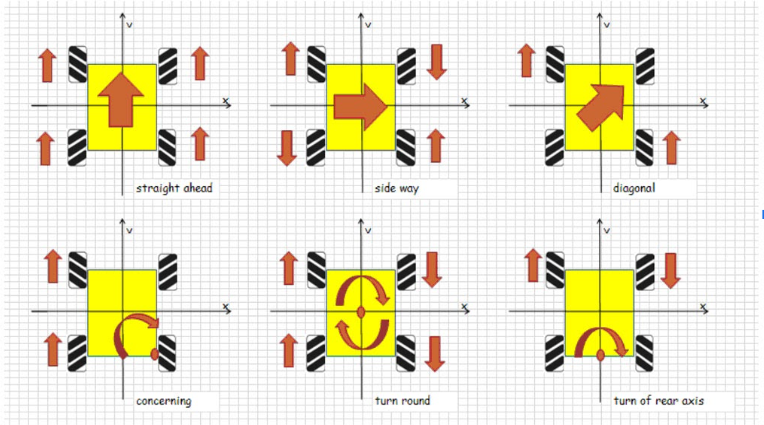
Omni directional movement allows for the path of Proposal Bot to move diagonally and side ways, along with forwards and backwards.
Mecanum Wheels

Mecanum wheels are a tireless wheel that instead uses a series of external rollers around the entirety of the rim. Each wheel moves independently with its own powertrain, which allows for movement in a vectored path by utilizing diagonal forces
How They Work
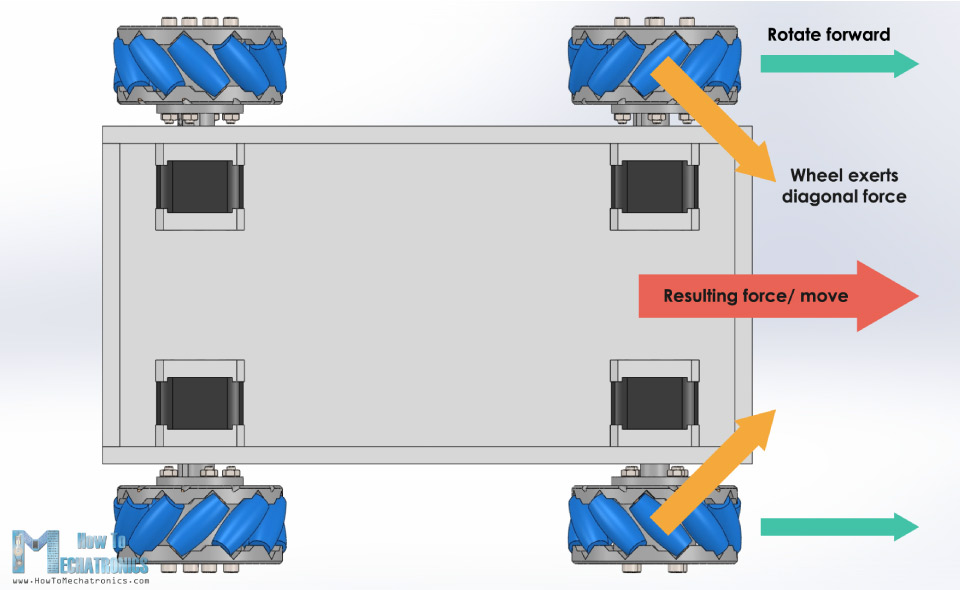
All 4 wheels in the same direction results in forward/backward movements since longitudinal force vectors add up but the transverse vectors cancel each other out. The rollers are positioned at a 45 degree angle to the axis of rotation of the wheel. By applying the force at an angle to the robot, the magnitude of the force vectors can be controlled which allows the robot to traverse in any direction while staying in a constant compass position.
Conclusion
Through coding and control in the Artxterra app, Proposal Bot is capable to move in an omnidirectional motion which allows for free range of movement when writing out “M-A-R-R-Y M-E ”