{kind=link}
Pick and Place-Preliminary Project Plan
Belinda Vivas (Project Manager)
Chastin Realubit (Mission, Systems, and Test)
Kevin Ruelas (Electronics and Control)
Tyler Jones (Manufacturing)
Table of Contents
Work Breakdown Structure
By Belinda Vivas (Project Manager) and Chastin Realubit (Mission, Systems, and Test)
The Work Breakdown Structure (WBS) is a summarized visual representation of the divided work between the three divisions (Systems, Electronics, and Manufacturing) to successfully complete the second generation of the Pick and Place. The WBS dictates the overall project schedule for the duration of the project, 16 weeks.

Figure 1 – Work Breakdown Structure
Source Material:
http://web.csulb.edu/~hill/ee400d/Lectures/Week%2003%20Creativity/b_Requirements.pdf
Project Schedule
By Belinda Vivas (Project Manager)
Following the defined Work Breakdown Structure, we can now present a detailed Project Schedule. This will give structure and clear direction to all divisions of the project, it presents a beginning and ending date, duration for each task, and how for certain tasks to begin the previous tasks have to be successfully completed.
Top Level Schedule
System/Subsystem Level Tasks
By Belinda Vivas (Project Manager)
The Top Level Schedule is a detailed visual representation of a detailed project schedule. If the team or a division engineer fall behind it will affect the remaining due dates of the tasks to follow, therefore the dates will have to be revised and shorten the period of future tasks to allow for the project to be finished on the desired due date. A longer time than what is needed was allocated for the Software and Assembly Phase for when a task is running behind schedule we can take days from those items. The Top Level Schedule further shows the System/Subsystem Level Tasks. The chart below shows the detailed Top Level Schedule for the second generation of the Pick and Place.

Figure 2 – Top Level Schedule from 01/23 to 04/02

Figure 3 – Top Level Schedule from 04/02 to 05/15
Burn Down/Project Percent Completion
By Chastin Realubit (Mission, Systems, and Test)
The Burn Down is graph representing the amount of work we have finished verses the amount of work we still need to do. We have currently finished more than 20% of the project.

Figure 4 – Product Burndown
System Resource Reports
By Chastin Realubit (Mission, Systems, and Test)
Mass Report
| Vacuum System Components | Preliminary Mass (g) | Uncertainty (%) | Margin (±g) | Expected Mass (g) | Actual Mass (g) |
| Stepper Motor (A-Axis) | 245.00 | 5% | 12.25 | 245.00 | 247 |
| Stepper Motor (Z-Axis) | 245.00 | 5% | 12.25 | 245.00 | 246 |
| Vacuum Nozzle | 40.00 | 5% | 2 | 42.80 | TBA |
| Z-Axis Actuator | 292.00 | 5% | 14.6 | 300 | 244.12 |
| Detection Camera | 300.00 | 5% | 15 | 312.00 | TBA |
| Project Allocation | Trade-Off Study will be obtained (Test to see when the Z-Axis can no longer pick up and item either due to vacuum strength or motor strength) | ||||
| Total Expected Mass | 1144.8 g | ||||
| Total Margin | 29.6 g | ||||
| Total Actual Mass | |||||
| Contingency | |||||
The purpose of the mass report is to ensure that the Z-Axis will be able to pick up any ICs or components that will we need to place on the 3dot board. Our design now is based on the first generation Pick and Place and will use mostly the same parts expect that we will be building on to it. We will add a camera in the Z-Axis so that the camera can be used for edge detection which will increase the accuracy of our machine. Next we will change the nozzle to one that has a smaller tip which will also increase accuracy. Using the first generation Pick and Place: Final Documentation, we were able to get the actual mass of each part except for the ones we plan on adding or changing.
Size Report
The size and weight of the Pick and Place will not need any report because instead of being placed in a small cabinet in ECS316, it will have a permanent place in ET111 We will discuss this matter with the instructor and the president. Because of this the only dimensions that we need will be the workable area that the nozzle can work in inside of the aluminum table. Those dimensions were given to us based on the work area of the XY plotter, which is 12.2” X 15.35”.
Power Report
| Components | Expected Current Draw (A) | Uncertainty (%) | Margin (±A) | Measured Current Draw(A) | |||||
| Stepper Motor (X-Axis) | .5 | 5% | .025 | ||||||
| Stepper Motor (Y-Axis) | .5 | 5% | .025 | ||||||
| Stepper Motor (Z-Axis) | .5 | 5% | .025 | ||||||
| Stepper Motor (A-Axis) | .5 | 5% | .025 | ||||||
| Detection Camera | .5 | 5% | .025 | ||||||
| Display Screen | .5 | 5% | .025 | ||||||
| Project Allocation | 3 A | ||||||||
| Total Expected Current | 3A | ||||||||
| Total Margin | .15 A | ||||||||
| Contingency | .15 A | ||||||||
We will be using the same electrical components powered by CSULBs power lines coming from the outlet as the first generation Pick and Place but we will be removing the Microservo and adding cameras and a screen to let the user know which component the Pick and Place in currently working on. We assume that they will all get the same amount of current. Testing needs to be done to check if true.
Project Breakdown/Cost Estimate
Manufacturing
By Tyler Jones
The original pick and place was design and built using a reel feeder system that was proven to work with 0402 components. In the second generation of the pick and place it should have the ability to keep the reel feeder system as well as add ABS plastic trays for individual part strips to be added. This allows for the machine to still utilize the reel feeders if necessary, and to add a way to manufacture boards with many different parts using multiple ABS plastic trays for all types of IC packages and sizes. An example of the size and dimensions in inches of the plastic trays are shown below in Figure 5. Implementing two of these trays allows for 8 possible channels for the SMT part tape to be feed onto the table. This can then successfully populate the 3DoT board with enough parts and covers all possible part diversity used in the 3DoT board.

Figure 5 – Component Feeder
Another requirement to fulfill is to populate a 3DoT board which contains many different components including resistors, capacitors, and IC of different sizes. In order to successfully manufacture boards with all these components it is necessary to make the machine easy to setup and to use. It should also be able to be easily disassembled and moved. The user must be able to setup the pick and place machine and operate it in a timely manner of less than two hours. It must be able to populate a 3DoT board in a reasonable time frame of ten to sixty minutes.
In order to accomplish this task, the pick and place will incorporate organized easily configured and usable mechanical design features. A storage cabinet can be created using acrylic plastic sheet stock. This plastic can be shaped and fashioned to fit underneath seamlessly into the legs and support system. The cabinet can be mounted underneath, and will be able to house the SMT part reels, the vacuum pump, spare nozzles, SMT part strips, scissors, and solder paste, and stencils. Additionally, the legs and support system of the machine must be raised in order to meet this requirement. This includes lengthening the legs from a current height of 7 inches to a new height of 10 inches. This will allow the cabinet to be placed underneath and house the pump, and other components, without adding too much additional height, length, and width. The current pick and place is (27.6875 inches long x 15.9375 inches wide x 17.625 inches in height) (27.6875” x 15.9375” x 17.625”) It is also essential to make all housings and compartments easily and quickly able to be disassembled, and assembled. This means that the bolts must be properly tapped and dyed into the plastic material. Countersinking will need to be done as well in order to provide no stress fractures or bending of the plastic material. The plastic can be pre-ordered from Home Depot and its specifications are below in Figure 6. Purchasing two of these sheets will be necessary to create the cabinet. The used will not have to be purchased and would only total to around $15-$20 if they were to be purchased. This would bring the total to $121.76 for the machines new layout.

Figure 6 – Acrylic Sheet
In addition to the creation of the plastic housing, the machines dimensions were written down and noted for further design in Solid works and machining. The current wiring of the pick and place is lacking organization, and functional design. The Ethernet CAT 5 cables cables connecting to the Me Uno microcontroller are too short to fully re-program the machine to operate on every operable inch of the aluminum picking and placing surface. This would call for longer 5-foot CAT 5 RJ 25 port sized Ethernet cables. These can be found on Digi key in many lengths and styles, for roughly $5-9 The link for the cables can be found below.
http://www.digikey.com/products/en/cable-assemblies/modular
A wire mold similar to commercially available V5000 series wire mold can be manufactured using Solidworks STL files, and ABS plastic. These wire molds can be mounted in channels on the inside of the housing so that the wires are not stretched or damaged. Further Solidworks files will be generated.
A trade off study should be used to measure vibrations or disturbances at the base of machine using different methods of testing for shaking, vibrating, and shock. This is important because stability is vital in a precision robotic machine used to pick up very small components. Rubber shoes can be fitted onto the legs and tested as the machine operates for disturbances in the pick and place routine. Figure 7 shows a block of rubber that can be purchased and shaped into shoes that cover the legs of the machine. The rubber block can be purchased for $6.95 online.

Figure 7 – Rubber Bench Block
Another trade off study should be taken in positioning the reel feeders so that the tape can freely and easily be stripped of tape and moved the same consistent distance by the micro servos motors. This will affect the height and dimensions of the plastic cabinet.
A key facet in creating the pick and place to be more user friendly is implementing a LCD and LED screen that displays instructions and live camera feed of the machines operations. These components need to be large and accessible in order for the user to view and interact with the machine. The plastic housing underneath the machine will be able to house folding or telescoping style mounts for the LCD and LED screens. This allows the screens to be tucked away without taking up unnecessary space. A trade off study can be conducted in order to find whether or not the folding or telescope system is more durable, and stable.
Inside the plastic housing design and small slide out drawer can be easily fashioned and located underneath the tape that is pulled from either the stationary trays or the current reel feeders. This cleans up the mess as the machine functions and can easily be slid out and thrown away. A force analysis should be calculated to see how much force will push back on the tape. This is critical because if the force of the tape hitting the edge of the drawer is too great it will throw off the alignment.
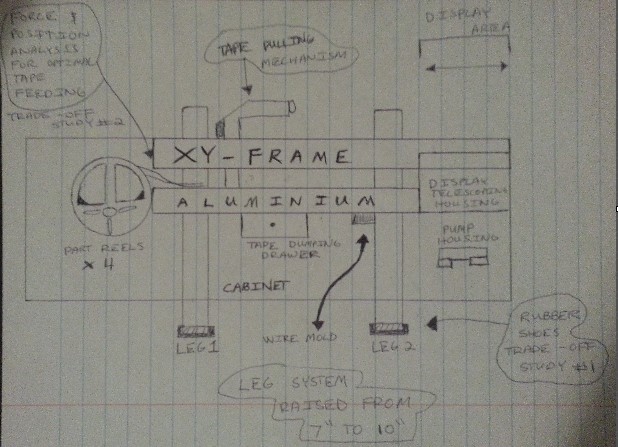
A rough preliminary scale model below in Figure 8 shows the relative positioning of devices, and layouts represented in this article. Further rendering will be provided in Solidworks.

Figure 8 – Rough Preliminary Draft
MECHANICAL COST PROJECTION
|
Item |
Projected Cost | Margin | Actual Cost |
| Anti-vibrational Rubber | $6.95 | 5% | |
| Acrylic Plastic Sheets | $121.76 | 5% | |
| 5’ RJ25 cables | $7.50 | 5% | |
| STL 3D prints | $15.00 | 5% | |
| Spring Loaded nozzle | $10.00 | 5% | |
| TOTAL | $162.11 | 5% |
MECHANICAL SYSTEM WEIGHT
Total system weight added to current system is 14 pounds with a %5 margin. This estimate is contingent upon design and features.
Electronics
By Kevin Ruelas
Cost
2 Cameras + additional drivers ~$50 ea
LCD Screen ~$50
RJ25 Adapters/cables ~$15
All cost has a margin of 5%. When adding the cost for Manufacturing and Electronics it gives a total cost of $277.11 for the second generation of the Pick and Place.