Proposal Bot/Spring/2020
Motor Trade Off Study
Author/s: Jonathan Valdez (Electronics & Controls – Hardware)
Table of Contents
Introduction
There are two types of motors that are generally used in the electric engineering industry, first of which is the stepper motor. A stepper motor is a brushless DC electric motor that divides a full rotation into a number of equal steps and is an open-loop control system. The second type of motor is a servo motor which is a rotary actuator used to control precise angular motion and contains a motor coupled to a senor for positional feedback which is a closed-loop system. When correctly applied both types of motors can be effectively used depending on the application and specifications of the design.
STEPPER MOTORS
Stepper motors are generally less expensive than other types of motors and for the price, they can provide good quality performance. These stepper motors are designed for applications that require low accuracy, low speed, and low acceleration.
PROS OF STEPPER MOTORS
This type of motor has a very high pole count which allows the motion to appear continuous. Since they use incremental motion the motor is running as an open-loop system which makes the need for an encoder unnecessary. No encoder requirement lowers the cost of the motor as well as the complexity in the application of the motor. At zero to low speeds, this motor provides maximum torque.
CONS OF STEPPER MOTORS
This motor is restricted to low speeds since the torque greatly declines as speed increases. As the motor turns the applied load the rotor is not fully controlled, which can result in an incorrect number of steps being taking. Since this motor is a type of spring-mass system under a load the desired resolution counts per revolution is low which causes tracking of movement to be inaccurate.
PROPOSAL BOTS NEMA 17 STEPPER MOTOR
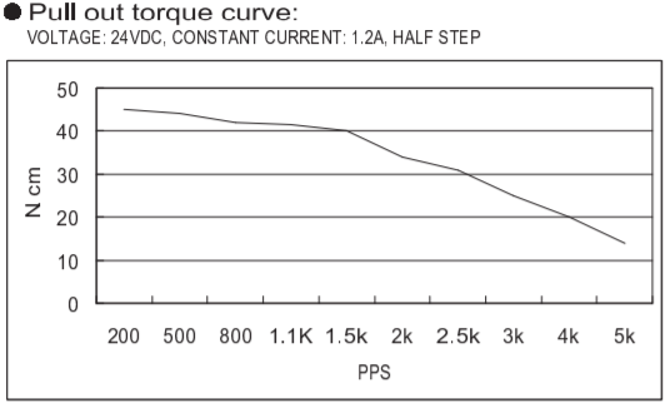
Figure 1: NEMA 17 Stepper Motor torque curve
After my initial research between Stepper versus Servo Motors, our team decided to use the NEMA 17 stepper motor to drive the four wheels of Proposal Bot. This torque curve shows the relationship between Torque in units of Newton per centimeter versus pulses per second. This stepper motor is specific to our project and generates high torque at low speeds which is an application we can take advantage of since we plan to move Proposal Bot at low speeds.
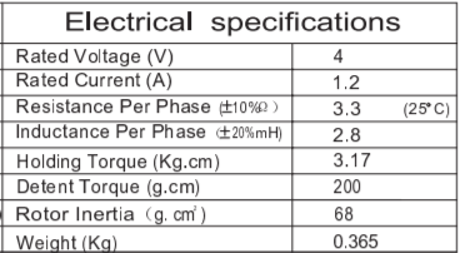
Figure 2: NEMA 17 Electrical Specifications
Figure 2 is a reference Table used for the four NEMA 17 stepper motors. Some of the key electrical specifications that must be taken into consideration while working with these motors is the rated current, holding torque, and weight.
SERVO MOTORS
Servo motors are generally more expensive than its counterpart, however you get what you pay for. Servo motors are designed to deliver highly accurate positioning as well as improved speed and acceleration in comparison to stepper motors. This closed loop system allows the controller to command that the load remain at a certain position therefore this motor has pinpoint holding torque. Servo motors are more sophisticated and can be used with gearboxes to produce high and consistent torque at a wider range of speeds compared to stepper motors. Servo motors also use an encoder, this encoder provides closed loop feedback signals by tracking the speed and position of the motor shaft.
PROPOSAL BOTS SG90 SERVO MOTOR

Figure 3: SG90 Servo Motor
Figure 3 shows the SG90 Servo Motor we plan to use to drive the pen plotter and ring box of Proposal Bot. After the initial research, our group determined that the SG90 Servo Motors would be the best bet to drive the pen plotter and ring box due to its low weight and accurate positioning it would be easy to control with its 180-degree range of motion.
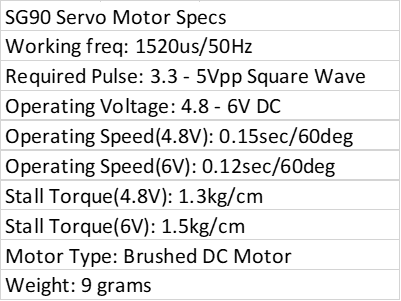
Figure 4: SG90 Servo Motor Specifications
Figure 4 is a reference table used to control the two sg90 servo motors. Some of the key electrical specifications that must be taken into consideration while working with these motors are operating voltage, operating speed, and stall torque.
Conclusion
Stepper motors are useful and can work good for certain applications that require low accuracy, low acceleration, and low speed. However, servo motors are more superior for systems that require high accuracy, high speed, and high acceleration. Servo motors have higher performance standards however they do cost more and are more complex to use due to the encoder. Therefore, depending on the specifications of the project such as desired speed, acceleration, accuracy, load, and size one can determine which type of motor would best fit the design and make the decision whether or not to spend the extra cost for better performance.