
Spring 2017 Prosthetic Arm: Iteration of the Arm Design
The Robot Company | CEO Professor Gary Hill
Blog Post created by Project Manager | Bianca Esquivel
Project Test Executed by Manufacturing and Design Engineer | Cedric Yannick Mbetga
Table of Contents
Preliminary Information
Test Objective
Purpose: To come up with the appropriate model while meeting L1 requirements.
Aim: After the first prototype was printed, the space for the servo was too small. Therefore, this process allow us to solve the problem and redesign the arm to allow for more space.
Materials
- Solidworks Software Program
- 3D Printer
- Blue 3mm PLA
Test Set Up
Results
For the Lower Forearm Preliminary Model (Model 1): We attempted to fit the Servo in the lower forearm, BUT THERE WAS NO SPACE. Therefore, the design needed to change.
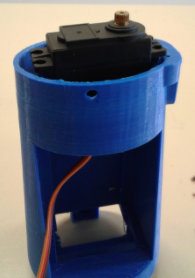
For the Lower Forearm Model 2: The lower forearm preliminary model was redesigned to allow the servo to fit in it. As observed in the images below, it can now fit.
For the Wrist Base Preliminary Model (Model 1): The connection mechanism to the lower forearm was not strong enough and broke easily. Therefore, it needed to be redesigned and reprinted to be stronger.
For the Wrist Base Model 2: The connection system was redesigned to be stronger/sturdier than the original design.
For the Wrist Preliminary Model (Model 1): It could not meet L1 requirements because it was not strong enough to hold a 1kg mass.
For the Wrist Model 2: The thickness was increases and the handle fillet was slightly changed so that it could withstand at minimum a 1kg mass.







Conclusion
The final assembly of the model of the prosthetic hand was created by the end of this group of design iterations.