{kind=link}
Spiderbot: Chop Suey Returns
By Matthew Clegg, Computer & Control Systems
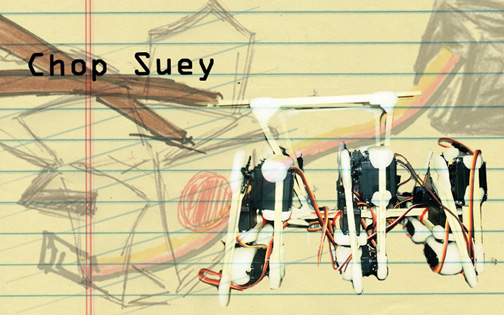
Chop Suey has returned! David Gonsalez, a member of the Hexapod team from the previous semester, has loaned us the hexapod prototype he built. Having access to an already built prototype will save time and money because we will not have to devote resources to make one. It will also allow me to visualize how the servos will be working to move the legs and body, depending on which type of walk, or gait, the Spiderbot will use.
We scouted the area where Spiderbot will be required to move through and took measurements of obstacles. After previewing the terrain, it seems that Spiderbot may have to switch between two different types of gaits in order to overcome obstacles and move with good speed. The two gaits in consideration are the tripod gait, which will allow for a greater speed on level surfaces, and the wave gait, which is slower but will allow for more stability over uneven terrain.
Further explanation of these gaits can be found in the blog of the previous semester’s Hexapod project.

The length of some of these obstacles will also affect the distance that the legs of Spiderbot will have to sweep. This will be determined in part by the length of the legs. The photo above indicates that the maximum width of the obstacles from a top view (both sprinkler heads and branches) measured to 2.5 inches, which is the leg sweep that will be required of Spiderbot.
In accordance with the previous semester’s design choices, we have also decided to use the Arduino Mega ADK, as well as the Adafruit 16-Channel 12-bit PWM/Servo Driver in Spiderbot’s design. The Mega ADK will allow for fewer complications when interfacing with an Android smartphone because of the dedicated usb port placed on the board. The Mega ADK will not be able to support the number of servos we will be using (a total of 20 servos!), which is why we will be using servo drivers. The use of the drivers will also free up processing power from the Arduino ADK. These components are shown below:

Image from: http://arduino.cc/en/uploads/Main/ArduinoADKFront450px.jpg
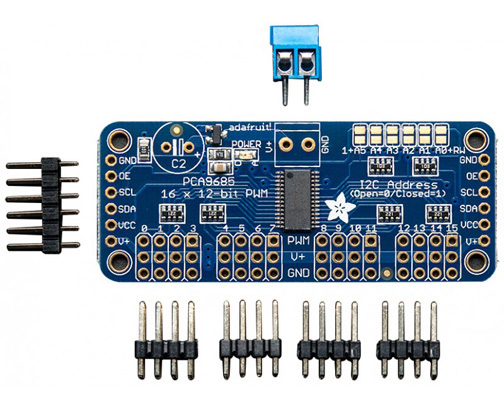
Image from: http://www.robotshop.com/media/catalog/product/cache/1/image/800×800/
9df78eab33525d08d6e5fb8d27136e95/a/d/adafruit-16-channel-i2c-servo-controller-1_1.jpg
The next thing in store for Spiderbot: trade-off studies of servo motors for leg operation of Spiderbot and familiarization with everything Chop Suey has to offer to better our design.