{kind=link}
Spring 2016 3D SMD: Geared Stepper Motor Trade-Off Study
By Bao Loc Doan (Project Manager)
Table of Contents
Requirement L2 – 3: Makeblock XY Plotter motors shall be modified to 0.05 mm error tolerance.
Introduction
The Makeblock XY Plotter came with two (2) Makeblock 42BYG stepper motors. The stepper motors control our x-axis and y-axis movements. Geared stepper motors were given as a suggestion to replace our current x and y axis stepper motors for higher accuracy. After testing the current stepper motors and presenting our PDR demo, it was agreed that the movement of the x-axis and y-axis are too slow.
Discussion
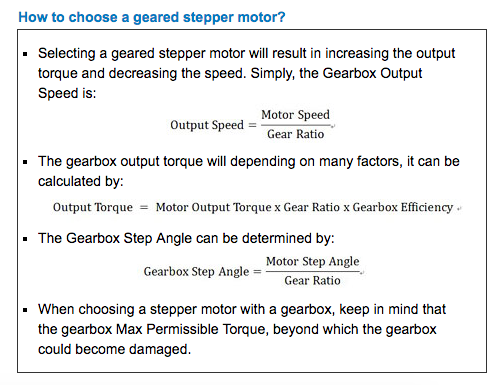
Figure 1 – Determining geared stepper motors (reference link at the end)
Our current stepper motor are bipolar stepper motors. Normally, these give more torque at low RPMs, while unipolar stepper motors spins faster for the same motor and power supply. The Makeblock Robot Plotter kit came with bipolar stepper motors as well as compatible stepper drivers.
We understand that what we are looking for are top output speed and the acceleration. Purchasing a 5:1 gearbox for the same stepper motor would change the step angle going from 1.8 degrees to 0.35 degrees if using the same stepper motor specs. After research, there is a Makeblock 5:1 geared 47BYG stepper motor that costs 59.99 per unit. This would make our machine increase accuracy by a factor of 5 but is out of our budget and would make our machine slower if we still microstep 1/16th. After obtaining the geared stepper motor, experiments will be conducted to determine if it’s possible to microstep the motors to 1/8th step and maintain desirable error specs.
We know that our Makeblock 42BYG motor does 200 steps/rev and since the driver is microstepping 1/16th, that means it can go 3200 steps per revolution. We could full step the motors, but we would lose accuracy, which is not wanted. The reason why full stepping the motor would make the machine lose accuracy is due to the possibility of the motor skipping a step or losing a step since each step is more distant.
We would like to use the same mechanical parts as we do right now due to compatibility. If introduced to a different motor that may need a different voltage or current, then a different stepper driver would need to be developed in order to step the unit faster and thus spending more resources. Our current stepper motor is rated at 1.7 amps/phase, so in order to properly utilize the current stepper driver, the new motor must be rated at 1.7 amps/phase as well. We would need a motor that can run at least 5 times the motor speed of our current 42BYG, be driven by 1.7 amps/phase, rated 12 volts, and be priced under 35 dollars each (to fit in the budget) to maintain the same speed but have more accuracy.
A stepper motor driver that can step the motor higher could be a fix but our budget is very limited.
Conclusion
A 5:1 geared Makeblock 42BYG stepper motor will work in increasing our accuracy so our device could meet requirement L2 -3 – Makeblock XY Plotter motors shall be modified to 0.05 mm error tolerance. It will satisfy all compatibility requirements as well but budget remains an issue due to the 5:1 geared Makeblock 42BYG motor being $59.99 per unit. The issue in a geared stepper motor lies in that it will definitely make the Makeblock XY plotter move slower than it already is if we keep the microstep at 1/16th. We will conduct experiments where we can find a ratio between accuracy and speed (possibly 1/8th step) that will satisfy our error requirement as well as produce a satisfactory parts per hour speed. However, the speed requirement is not mandatory for this semester and this can be resolved by modifying the stepper driver in future semesters. We conclude that the stepper motor(s) linked above would be a sufficient fit for our needs.
References
Stepper Online: Motors & Electronics. Retrieved April 1, 2016, from http://www.omc-stepperonline.com/high-torque-gear-ratio-51-planetary-gearbox-nema-14-stepper-14hs201504spg5-p-294.html