{kind=link}
Spring 2016: 3DoT David Executive summary (Design Change Arguments)
BY:
Omar Mouline ( Project Manager),
Christopher Hirunthanakorn (Missions, Systems and Test Engineer)
Table of Contents
Project objectives:
The objective of 3DOT David Spider is to use scaled model of the Hexbug prototype to produce a cool project for the DIY community. The preferred method of control is to use Bluetooth communication between the remote-control (Iphone or Android) and the microcontroller on board of the spider The finished product must meet the following Program and Project Requirements:
- System processing using a microcontroller (either the 3DoT Board or Sparcs Macro.)
- Total production cost must not exceed $80.00.
- Short 3D Printing ( Not exceeding 6 hours and less than 2 hours for each single print)
- Control The Spider Bot from Arxterra app ( Android or Iphone) using bluetooth
- 3Dot david must be able to perform a safe interactive game with other projects in a specific field and date as Defined in mission profile
Mission Profile
The Mission Profile for the 3DoT projects is to perform robotic combat. With regards to the College of Engineering Health & Safety Policy, the projects must meet the following Requirements:
- The game will take place in ECS 315 in a 6 x 6 ft. area on the linoleum floor.
- Go head to head with other robots in an indoor game of IR tag
- The emitter must hit the detector in a straight line from a maximum distance of 5 ft.
- Every time a player is “tagged” by the IR tagging system, a sound will go off
- Delay time after each tag shall be 5 seconds
- When either robot has been “tagged” 3 times, the bot will shut down, indicating the game is over.
- The entire game will last from 10-15 mins
Updated requirements:
Program requirement:
- As a senior design project for Spring 2016, the project shall be completed by May 13th, 2016 Monday, May 9, 2016 2:45PM – 4:45PM (Final day) on the linoleum floor of ECS315 at CSULB.http://web.csulb.edu/depts/enrollment/registration/final_exam/spring_chart.html
- As a senior design project for Spring 2016, Documentation of the 3Dot Spider-bot shall be completed by the 25th of April http://web.csulb.edu/~hill/ee400d/Syllabus.pdf
Project Requirement:
- The 3DoT David shall be a robot that demonstrates the capability of the new 3DoT micro-controller for DIY hobbyists.
- The 3DoT David shall be a low cost project with a total cost that does not exceed $79.95, which includes the cost for 3D printing, PCB, battery, and other components.
- To document the difference between development cost and final product cost, the 3DoT spider project must create a Project Budget and a Product Budget.
- The 3DoT David shall be controlled by the Arxterra App used on a smartphone.
- The 3DoT David shall incorporate 3D printed parts to demonstrate the feasibility of the 3DoT board for 3D printed robots.
- The 3DoT David shall have a maximum 3D printing time of six hours for production of parts to ensure the quick production of the robot. Any single print cannot exceed 2 hours.
- The 3DoT David shall compete with other robots in a game of tag to demonstrate the functionality of the robot. The basic rules of the game are using an IR emitter to tag the opposing robot, must compete in a 6×6 ft area, have a delay period of 5 seconds after each tag, and be disabled for 10 seconds after three tags.
System requirements:
- The 3DoT David shall utilize the HC-06 Bluetooth module on the 3DoT board in order to receive commands from the Arxterra App using a smartphone.
- The 3DoT David shall use a single 3.7V Lithium-ion battery or a 3.7V Lithium-ion Polymer (LIPO) battery to provide power for the robot. The 3DoT board will be providing power to all of the peripherals and uses a 3.7 Lithium-ion battery as its power source.
- The 3DoT David shall use two micro motors for the movement system of the robot.
- The 3DoT David shall use an infrared LED emitter and infrared detector for the tagging system in the game of tag.
- The 3DoT David shall be disabled for 10 seconds after being tagged three times to signify the end of a round in the game of tag. This means the robot does not respond to any commands for 10 seconds.
- The 3DoT David shall operate for 10 to 15 minutes, which should be equivalent to three rounds of the game of tag.
- The 3DoT David shall use a small speaker to produce the buzzing sounds to indicate the end of a round in the game of tag.
- The 3DoT David shall use a 3D printed chassis and legs. This follows from the project level requirement about using 3D printed parts.
- The 3DoT David shall include a PCB that uses a Schmitt Trigger circuit to convert the analog output from the IR detector into a digital output to be handled by the 3DoT board. It will also have a voltage follower and anti-aliasing filter for the synchronization of the two motors. This PCB shall also provide the connections from the 3DoT board to the peripherals such as the IR emitter, IR detector, and micro motors.
Subsystem requirements:
- The micro motors shall operate in between the supply voltage of 3.7V-5.0V, be able to rotate 360 degrees continuously, have a stall current of no more than 250 mA, and cost no more than $10 each in order to stay within our budget.
- The 3DoT David shall be made from PLA or ABS filament in order to minimize the mass of the robot and be strong enough to hold its weight.
- The IR emitter and IR detector shall be positioned at least 3 inches from the bottom of the 3DoT David.
- The maximum distance for the IR detector to detect a direct hit shall be 5 ft. This threshold is for when the IR emitter of the other robot is directly aligned with the IR detector, not when it is at an angle.
- The spider-bot shall have six legs to operate its course to battle robots.
Project key features
Design Change
We have been working nine weeks to design the the Hex bug in Solid Work, in week 9 our team with the agreement of the customer decided to Change the design for these reasons:
The hex bug design:
- Had a lot of small parts that needed to be printed with precision
- It was very complex for a beginner in solid work to design without a professional formation and the right help.
- 3D print resource provided couldn’t print our small parts with the precision we needed.
- All the part for the design needed to be 3D printed which will be impossible to accomplish with the time restriction given by the costumer.
- We couldn’t use any option other than 3D printing to fit our budget.
The geared design:
- We were able to be creative and adjust the design to our needs.
- The gear movement need some adjustment since the prototype walked only straight. we added a motor to control each side of legs.
- By adding the motor we were able to compile the moment of the spider. When we turn off the right motor the spider turn right and vice versa.
- Less part to print and they all were able to print with precision
- We could of used different method like laser cutting to get some parts but the 3D printing time was enough for our requirements.
- The Solid work design level of complexity was little bit higher than the formation and help provided by the division for the manufacturing engineer but not as high as the level of complexity of the Hex bug design.
Tagging System (interactive game)
For the interactive game we had 3 options : Laser tag, IR tag, and Ultrasonic. After doing research on each option we settled with IR tagging system for its safety. in the pictures below show some arguments why we choose the IR:

Motor Control
After assembling the 3DoT David we found that the Motor synchronization is optional, the leg position helped the robot to move forward even if the motors are not in sync. Before that, we looked different possibilities on how to synchronize the two motors and it is shown on the table below:
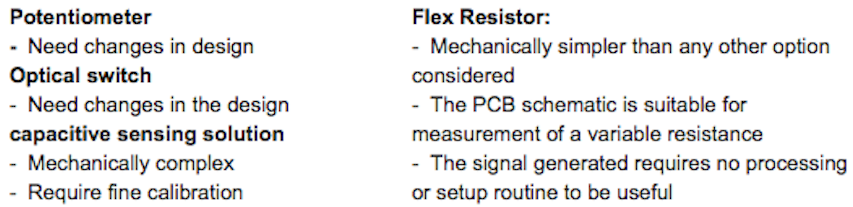
We ended up choosing the Flex resistor. After implementing it to our robot we found that there is a different where the spider move was more in sync.