Spring 2016 Pathfinder Preliminary Design Documentation
By:
Peiyuan Xu (Project Manager)
Xiong Lee (Mission, System and Test Engineer)
Juan Acosta (MCU Subsystem and Control Firmware)
Tuong Vu (Sensors, Actuators and Power)
Lindsay Levanas (Design and Manufacturing)
Table of Contents
Program Objective/Mission
By: Peiyuan Xu (Project Manager)
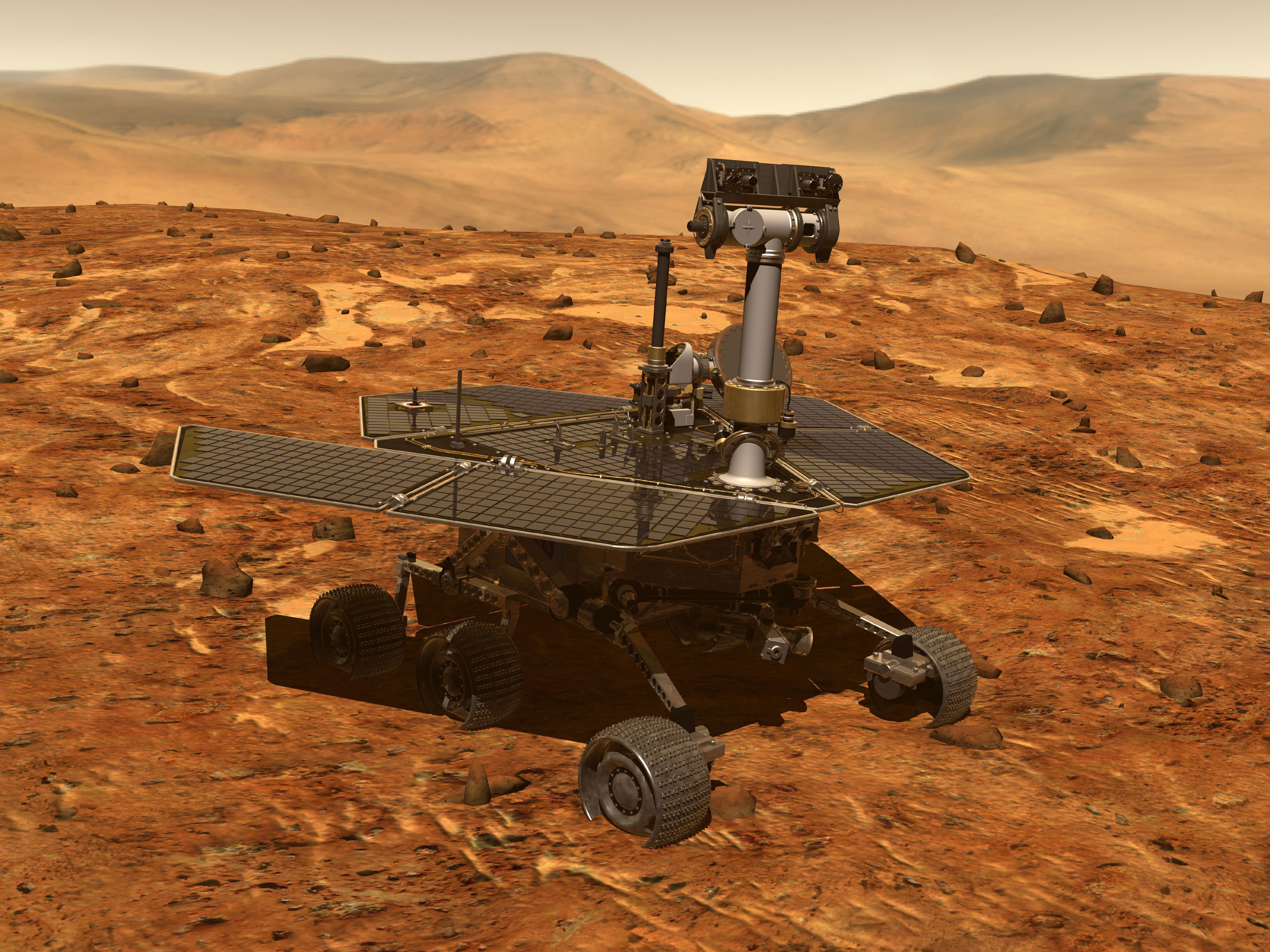
The spring 2016 Pathfinder Rover was inspired by the design of NASA’s MARs Exploration Rover-“Sojourner”. The purpose of this Rover is to explore the beauty of CSULB campus at night in a self-sufficient way. The Pathfinder is allowed to have the solar panel charging the battery for up to 8 hours during the day time. Then the customer will spend 4 hours at night walking and exploring with the Pathfinder . The customer can use Arxterra control panel on the PC to navigate the Rover by using the cursor to click a point on the map. This generation of Pathfinder Rover is designed to test and implement SLAM (Simultaneous Localization and Mapping) technology for autonomous vehicles.
Program Requirement
- The Pathfinder project must be completed by May 2, 2016, the last day of EE 400D class. (From the Syllabus here)
- The cost of the project should be limited to $800 (Need customer verification)
- The Project Final Documentation must be turned in by April 25th, 2016. (From the syllabus here)
Project Level 1 Requirement
- The pathfinder shall be able to explore the terrain at CSULB campus at night
- The speed of the pathfinder shall be slower than human walking speed and faster than the Sojourner rover.
- The pathfinder shall be able to explore the campus at an interval of 8 hours charging (during day time) and 4 hours run time (during night time).
- Sealed electronic enclosure required to protect electronics from dust
- The pathfinder shall be self-sufficient by using 3 solar panels
- Sealed pan and tilt system for the Android phone/Google Tango Tablet.
- The tango will be able to gather depth perception data and send it to the Arxterra control panel.
- The pathfinder shall be able to go to the place wherever the cursor points on the Arxterra control panel.
- The customer shall be able to see what the rover sees on the camera
Source Materials
- Fall 2014 Pathfinder Preliminary Design here
- Curiosity Rover Wiki here
- Getting start with Project Tango API here
- Google Project Tango Overview here
- Project Tango Indoor Mapping here
- Project Tango Intro to Point Cloud here
- Project Tango Intro to Depth Perception here
- Autonomous Quadrotor Flight Based on Google’s Project Tango here
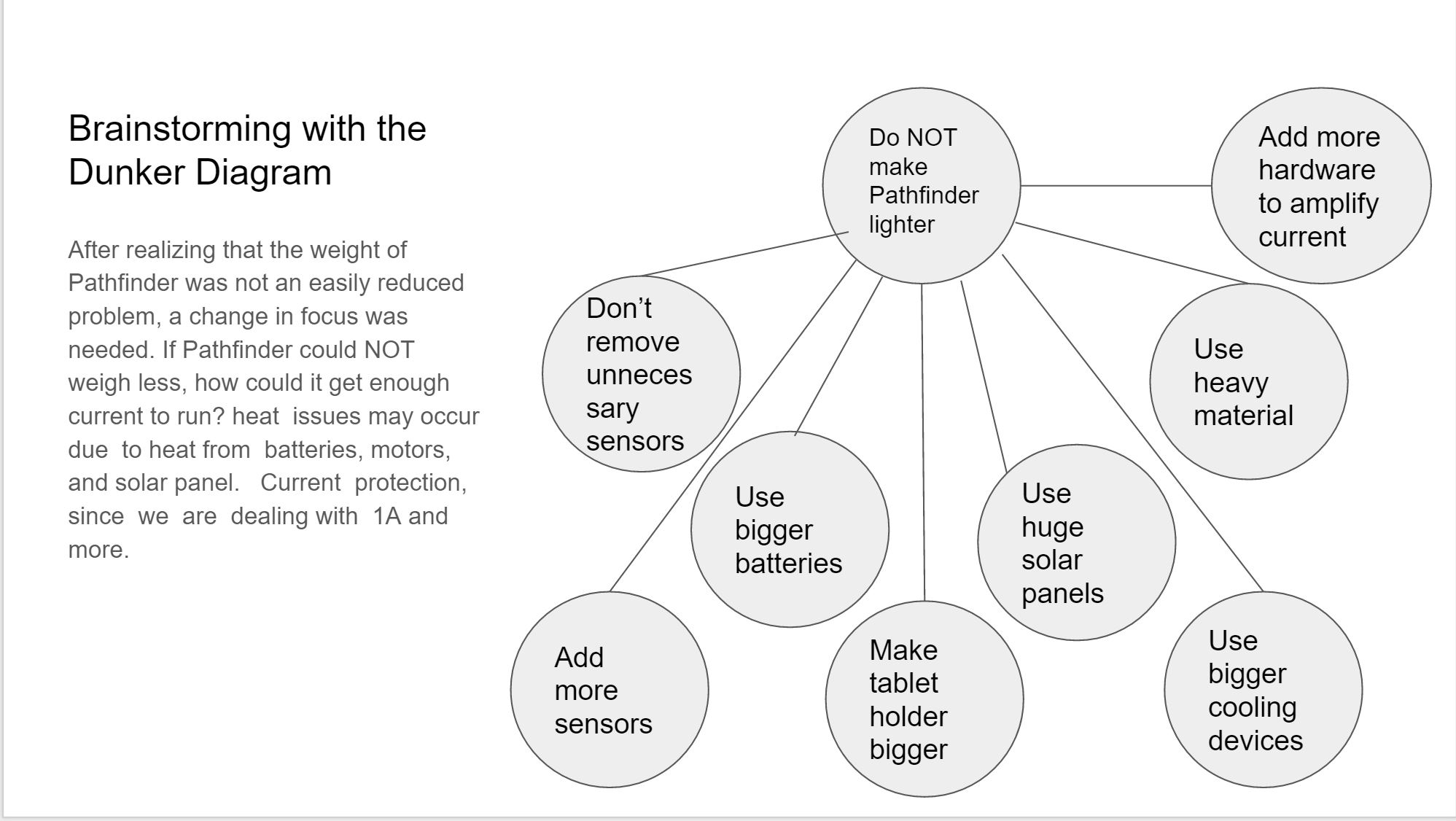
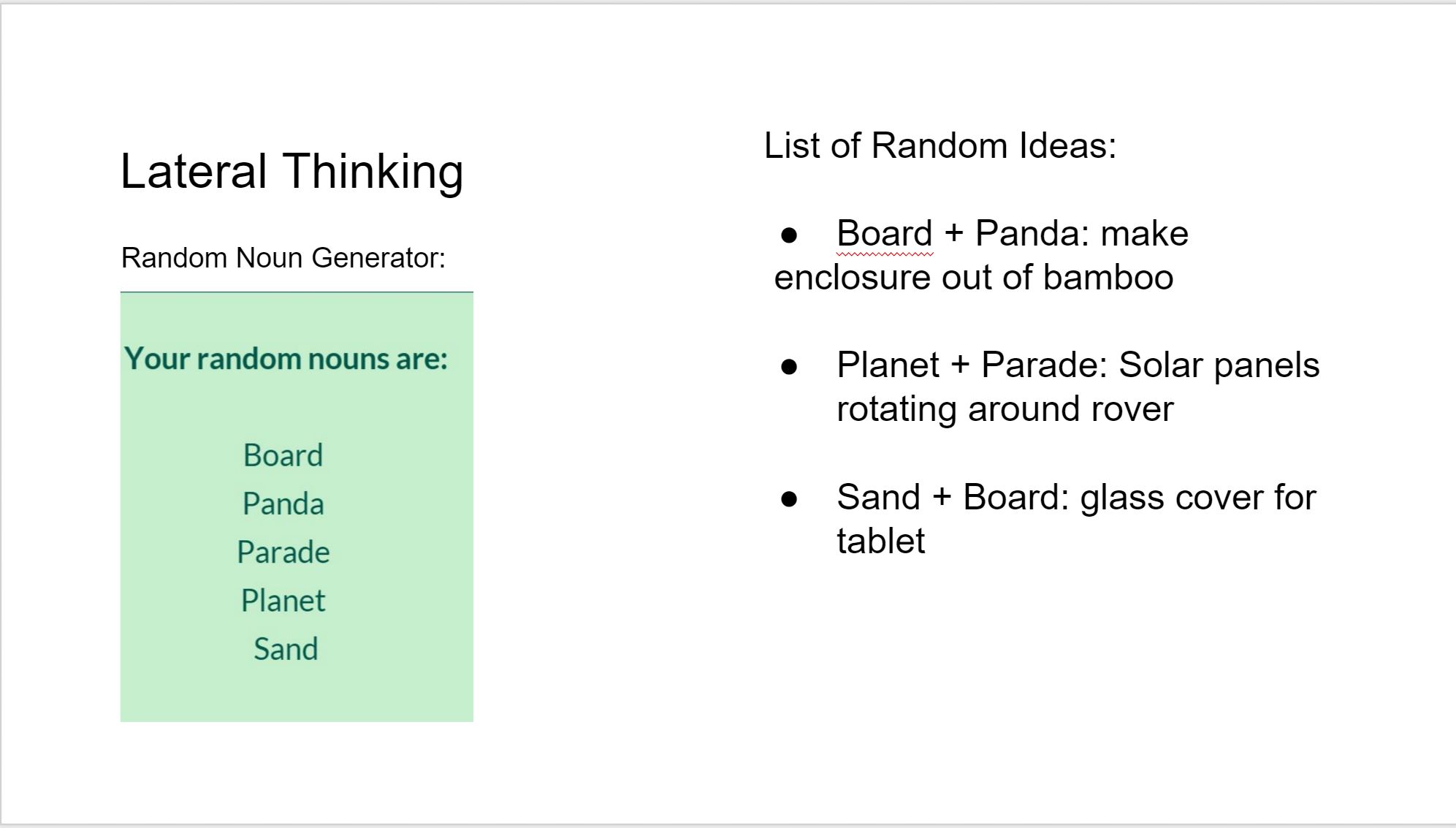
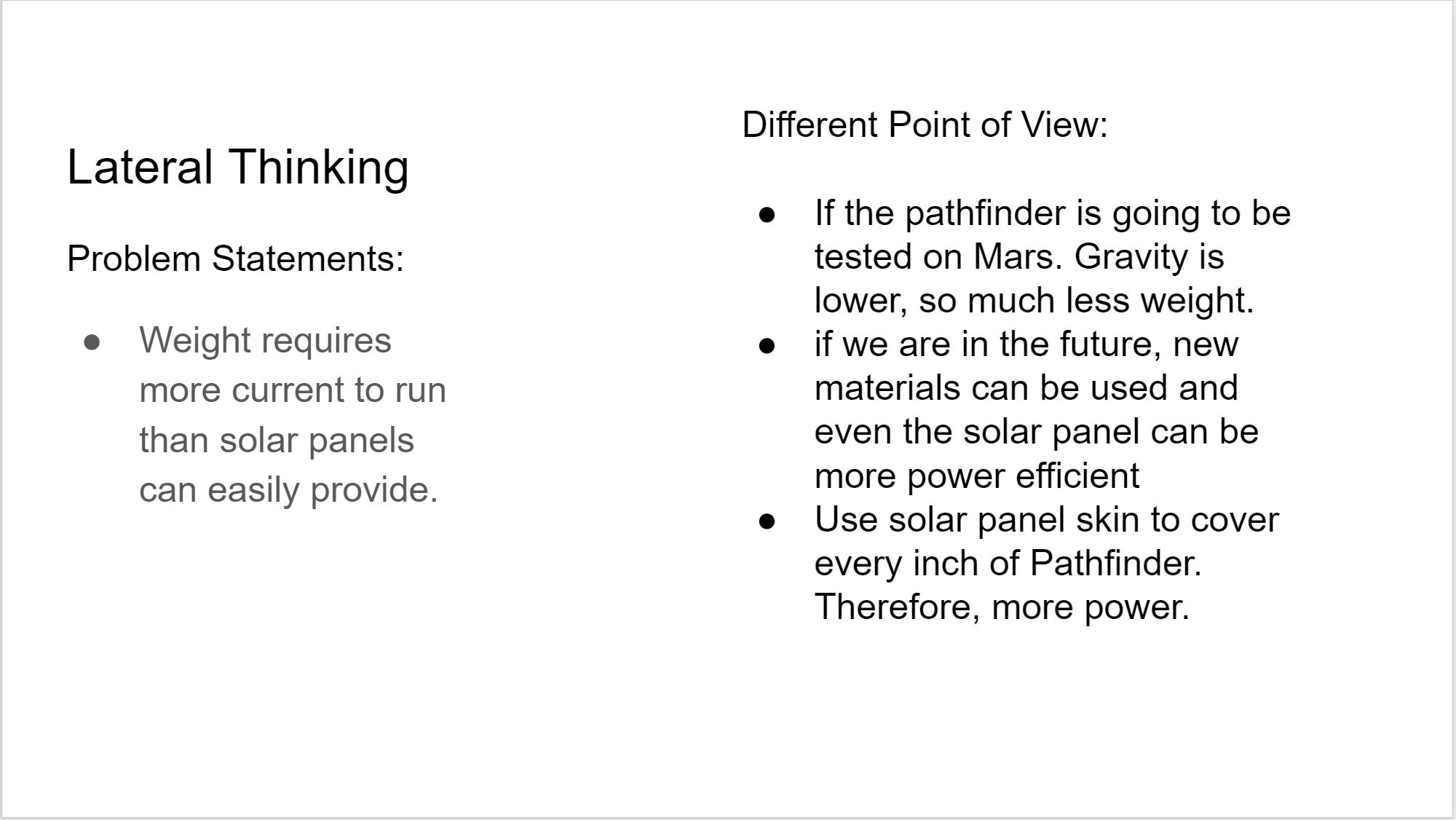
Design Innovation
System Requirements (Level 2 Requirements)
By: Xiong Lee (Mission, System&Test)
- In order to navigate through the terrain of the CSULB campus, the suspension and chassis will be designed to clear at least twice the diameter of the wheel. (found in the mars rovers) The Rocker Bogie design will be implemented to achieve a clearance of at least two times the diameter of the wheel.
- Due to the customer’s request to not go faster than walking speed, the pathfinder will not exceed 3ft/sec (about 2 mph).
- The motors will be calculated to ensure it will not go faster than 3ft./sec.
- Results: TBD
- The motors will be able to climb up an incline of 45 degrees. An experiment will be conducted to see what motors we need to get to achieve this requirement.
- The pathfinder will go faster than the curiosity rover (3in/sec). The motors will be calculated to go faster than 100m/sol.
- To explore the campus for 4 hours at night, we will install the battery or batteries to handle this run time.
- The solar panel will be able to charge the pathfinder 8 hours so it can finish its mission of running for 4 hours.
- The electronic enclosure will be made out of ABS plastic material to protect the electronics.
- The pan and tilt system will be 3D printed and designed like the previous semester.
- The pan and tilt system will be slightly modify to accommodate the dimensions of the Google tango tablet.
- The Tango tablet will need to be able to communicate with an app to receive data from its point cloud to the control panel.
- To see whatever the rover sees, LED lights will be installed onto the pathfinder, so the customer can see whatever the rover is in front of.
- To make sure we don’t waste power to the LED lights when it’s still got enough light to see, there will be a switch and light sensor to turn the lights on and off.
- The pathfinder will go from 0.5 to 4 meters when clicked on the control panel. (The tango can scan approximately from 0.5 meters to 4 meters).
Source Materials:
- Mars Exploration Mission (Overcoming Obstacles) here
- Bogie Runt Rover (with chassis and Rocker Bogie Suspension) here
- Study Compared Older and Younger Pedestrian Walking Speed here
- The Mars Science Laboratory Mission here
- Arxterra Mini-Rosco Pan and Til System here
- Google Project tango overview here
Product Breakdown Structure
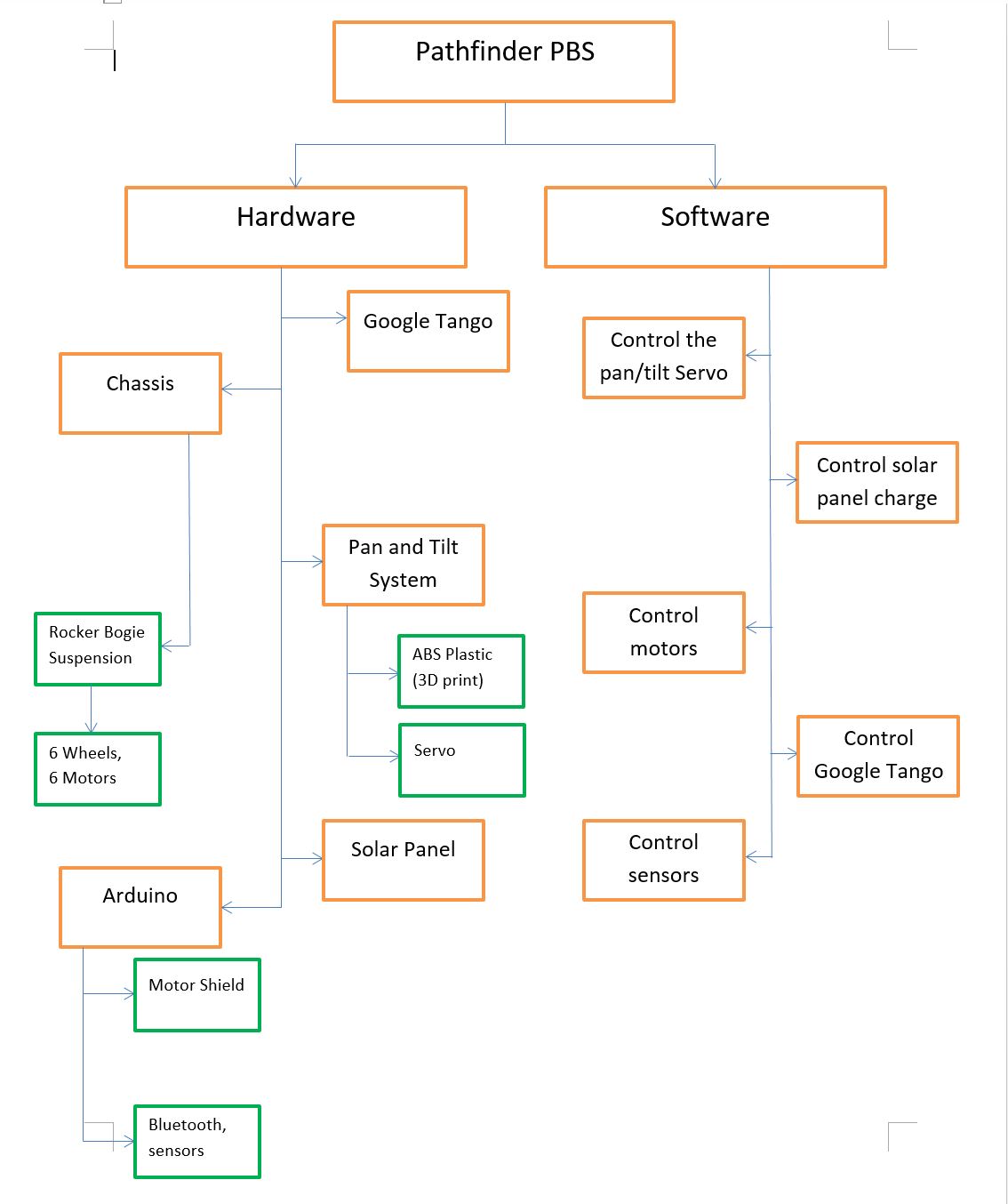
The main parts from hardware to software of our pathfinder is shown in the above PBS (product breakdown structure). Starting from the hardware, the chassis needs to be chosen to be able to handle the terrain in CSULB campus. One of the better idea we got was to use a rocker bogie system similar to the mars rovers. (Curiosity, Spirit and Opportunity, and Sojourner). The mars rovers are able to handle the harsh terrain of mars so choosing this suspension system would be a good choice to start the design. A pan and tilt system need to be installed to the pathfinder so we can scan the area with our Google Tango and android phone to be able to gather data on how far everything is. The solar panel needs to be able to charge up our battery during the daytime so we can have the Pathfinder running for good amount of time at night. Lastly, the software needs to be able to control everything on the hardware side to make sure the pathfinder will run correctly.
Electronic System Design
By: Juan Acosta (MCU Subsystem and Control Firmware)
Tuong Vu (Sensors, Actuators and Power)
System Block Diagram
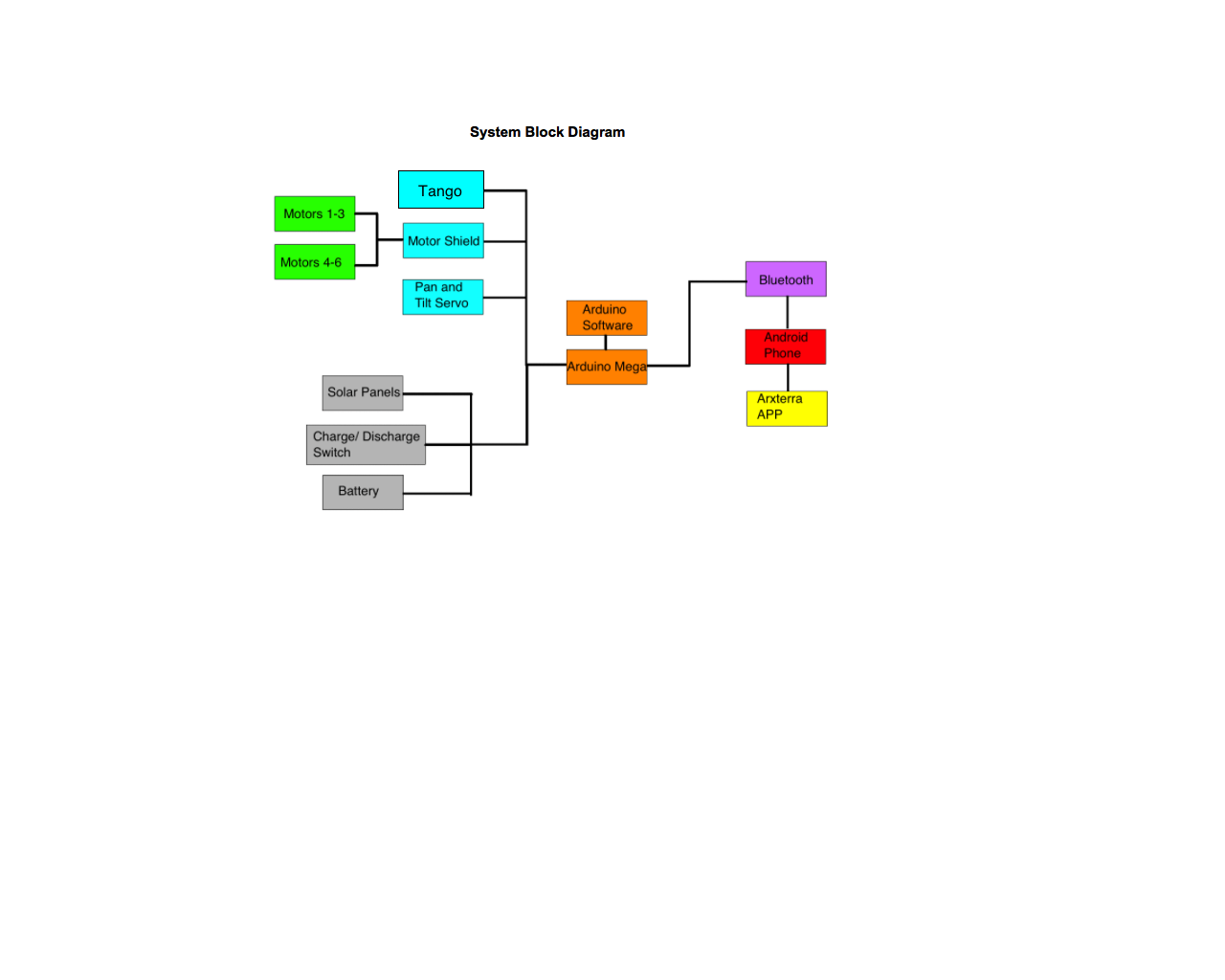
In the system block diagram, it shows how everything is connected to be able to control the pathfinder. The pathfinder will be running on mainly the arduino. The arduino will have a bluetooth module to communicate with the android phone and the control panel. On the arduino, there is a motor shield that will be able to run the motors in forward or reverse. It will also control the servos of the pan and tilt system to scan 180 degrees. To run the arduino, a battery will be installed and charged with the solar panels. Our main component is the Google Tango which will be use to 3D scanning the environment and send the depth perception data to the PC which will then give command to Arduino to control the Rover.
Subsystem Requirements
- The solar panels will have to charge the batteries for the Pathfinder in order to allow a 1:2 run ratio. (ex. 30 mins. run, requires 60 mins. charging time.) Current candidates require more testing of motor current draw.
- The solar panel(s) will resemble the Arxterra shape logo. In order to achieve this, we will be using multiple solar panels. (minimum of 3, maximum of 6 for weight and size concerns.)
- The Arduino Mega will act as a Voltage controller for the motor shield for the PWM supplied to drive the motors.
- The Arduino Mega will act as a charge controller in order to prevent the batteries from over charging and generating unwanted heat.
- The software code will allow the Pathfinder to drive forward, turn left or right, and rotate 90, 180, or 270 degrees.
- The Arduino UNO will control the pan and tilt servo for field of view through the android phone.
- The android phone will be used to communicate with the Bluetooth component and the Arxterra Control Application.
Power Flow Diagram

Battery is going to be the source of the power for the pathfinder, and many type of battery can be used in this application. The battery has to be able to deliver enough voltage and current to both the Arduino and motors & servos. High voltage has the potential of damaging the motors & servos and Arduino. Thus, buck regulators are installed in order to lower the incoming voltage from the battery. Over charging the circuit will result in damaging the battery, so a charge/discharge circuit will govern when the battery will connect to the solar panel or not.
Code Block Diagram
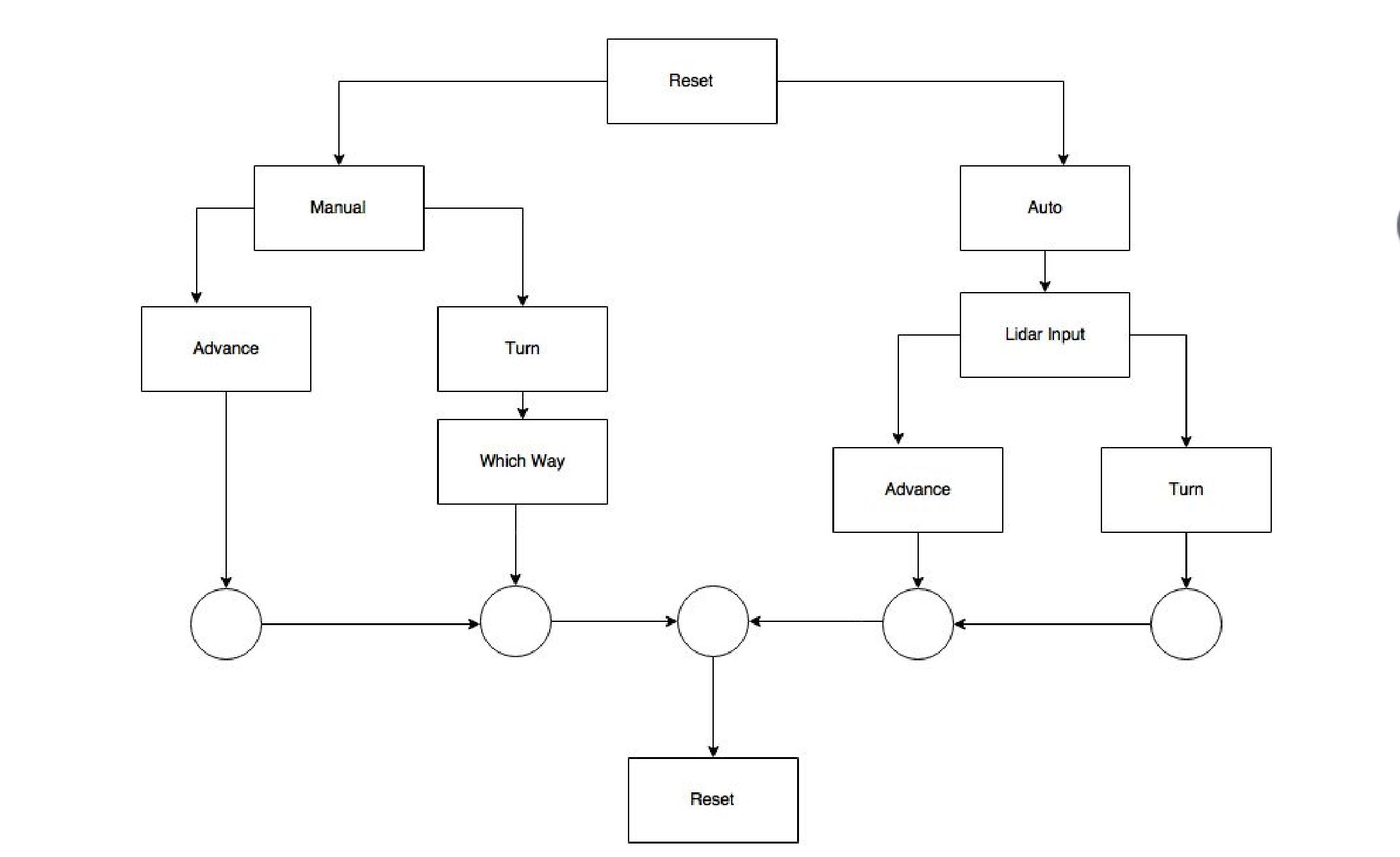
The Code Flow Chart shows how the Pathfinder will operate. It will be able to operate manually or on autopilot. Manually controlling the Pathfinder will involve the Android phone being used as a medium between the Arxterra Control Center and the Pathfinder’s commands. On the other hand, the autopilot feature will involve the Point Cloud System. Based on the depth perception data from the Google Tango tablet, communication will occur between the Tango tablet and the Arduino and allowing the pathfinder to voyage to set destination.
Interface Definitions
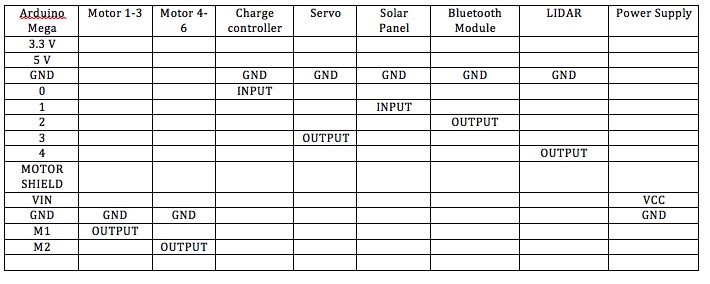
The interface matrix above details the connection between the microcontroller and the motor- shield, solar panels, and Bluetooth module. It also indicates that the Arduino UNO will use pins to control a servo, monitor voltage, and act as a charge controller by monitoring the solar panels.
Mechanical Design
By: Lindsay Levanas (Design and Manufacturing)
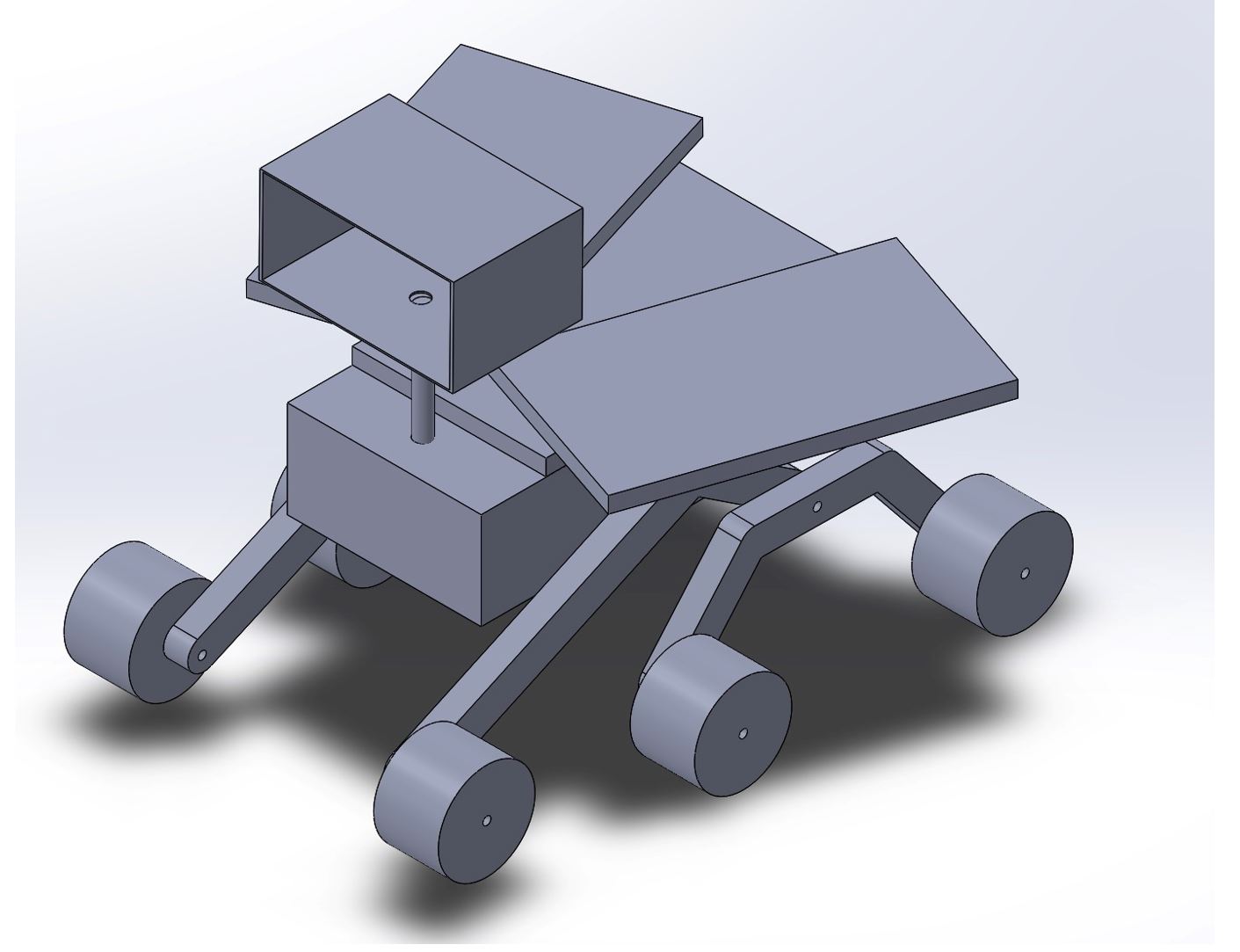
The above model illustrates Pathfinder’s conceptual design based off of both the level 1 and level 2 requirements. As stated in the level one requirements, Pathfinder must be solar powered, hence the thin rectangles on the top of the body. A pan and tilt system for either an Android phone and Tango tablet is required and is modeled as a box (the length and width of an Android phone2) on a pole. The box will contain the phone (and Google Tango) and the wires will run down the inside of the pole into the body of Pathfinder. Pathfinder’s body then will house the electronics in a sealed enclosure as defined in the level 1 requirements. Lastly, Pathfinder will utilize a rocker bogie suspension system as a level 2 requirement to meet the level 1 requirement of being able to explore the CSULB campus
Source Materials
Axterra Website here
Android Phone size here
Design and Unique Task Description
Power System Design
By: Tuong Vu (Sensors, Actuators and Power)
Here are the specifications of our motors, wheels, and chassis.
| motors | (6) 140 Pre-wired motors |
| wheels | (6) 2.55” Press Fit Wheels |
| Chassis | (1) ABS Robot Chassis |
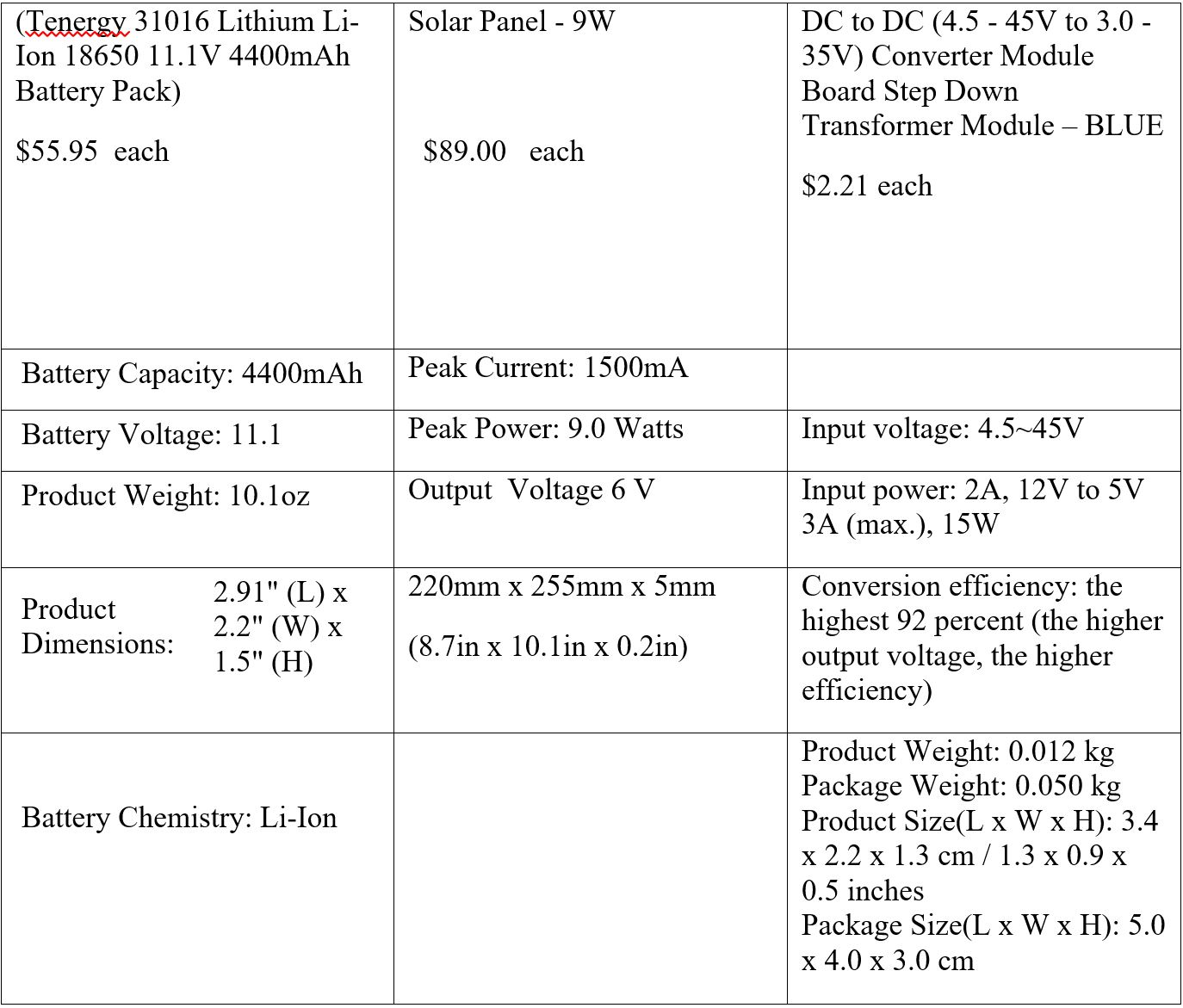
Our servos with be the same servo used by the previous team. Using lithium battery will reduce the charging time of our rover, the specification of the battery is as the following (Tenergy 31016 Lithium Li-Ion 18650 11.1V 4400mAh Battery Pack). We are planning to use two of them, one for two front wheels and the other for the two wheels in the back. Our solar panel is going to be Solar Panel – 9W; we need 3-4 panels to have enough voltage to charge the batteries. Using two DC-to-DC (4.5 – 45V to 3.0 – 35V) Converter Module Board Step Down Transformer Module – BLUE, we can step down the incoming voltage from the battery.
Source Materials
More on Mechanical Design
By: Lindsay Levanas (Design and Manufacturing)
-
Rocker bogie design
- Structure must be such that Pathfinder’s chassis can clear twice the wheel’s diameter. To do this, the distance between the bottom of the chassis and the bottom of the wheel must equal twice the wheel’s diameter.
- The struts must be calculated to allow for level orientation of the chassis. Back-of-the-envelope calculations used for the 3D model are provided below however more formal calculations will be needed for the final design.
- Material and cable tree for the rocker bogie suspension system will need to be defined.
-
Solar panel layout and shape
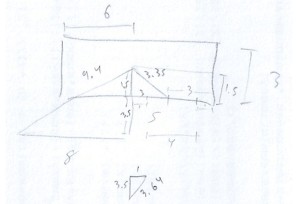
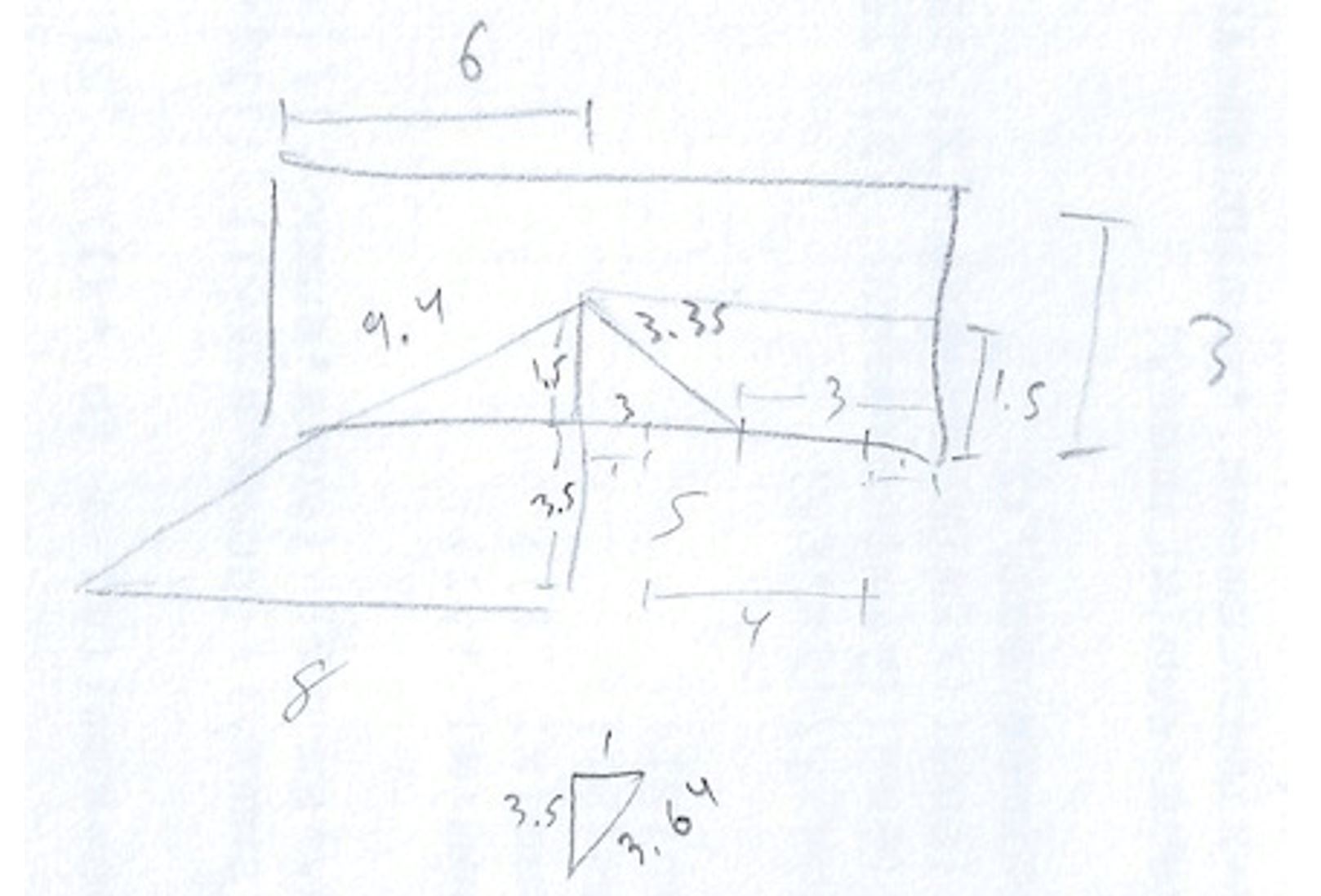
 Once the power systems engineer has selected the solar panels, they will be balanced on the top of Pathfinder in the shape of the Arxterra logo. The rough sketch the 3D model is based on is shown above, however more accurate measurements will need to be made once the solar panel dimensions are known.
Once the power systems engineer has selected the solar panels, they will be balanced on the top of Pathfinder in the shape of the Arxterra logo. The rough sketch the 3D model is based on is shown above, however more accurate measurements will need to be made once the solar panel dimensions are known.
-
Pan and tilt system
-
- The materials, dimensions and location of the pan and tilt system will be based around the mapping device (either Android phone or LIDAR) selected for Pathfinder.
- The servos will be housed inside the main body of Pathfinder.
- Wires will be contained inside the pan and tilt structure.

{kind=link}
{kind=link}