{kind=link}
Spring 2016 RoFi: Calibration
Christopher Andelin (Project Manager)
Mario Ramirez (Systems Engineer)
Qui Du (Manufacturing Engineer)
Andrew Laqui (Electronics and Controls Engineer)
Henry Ruff (Electronics and Controls Engineer)
Calibration
Mario Ramirez (Systems Engineer)
Introduction
Before attempting to walk with RoFi, a calibration test must be done. Using Robot Poser, Jonathan’s instructions and the calibration file (located below), perform the needed test and create your own calibration file. This file will be RoFi’s starting/zero position for each routine in the future. All future angles will be in reference to these zero frames.
Robot Poser: http://www.projectbiped.com/prototypes/rofi/programs/robot-poser
This download includes the calibration file.
Jonathan Dowdall’s instructions: https://docs.google.com/document/d/1H0iGTlUO-VljwtqiN5W3QWxoLYYhNEEphhULrg87Wgc/edit
Blender File for RoFi calibration:
https://docs.google.com/file/d/0By_h1KTMNaWNcmlMS0FNWGJ5OVE/edit
This post is in reference to, https://www.arxterra.com/bipedal-robot-calibration/.
Our team’s calibration
Figure 1 shows RoFi in High Roll Position.
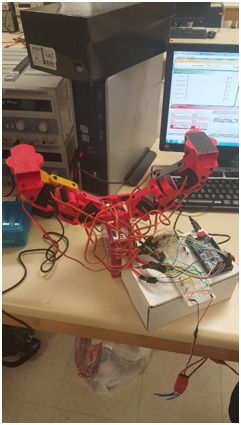
Figure 1: High Roll Position
Figure 2 shows that RoFi’s foot is level.

Figure 2: Verifying Level Foot
Figure 3 shows RoFi’s leg is perpendicular to the table.
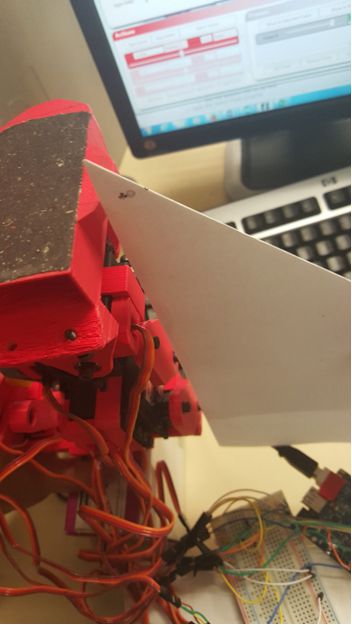
Figure 3: Verifying Perpendicular Leg
Figure 4 shows RoFi in High Position.

Figure 4: High Position