{kind=link}
Spring 2016 RoFi: Center of Mass Report
Christopher Andelin (Project Manager)
Mario Ramirez (Systems Engineer)
Qui Du (Manufacturing Engineer)
Andrew Laqui (Electronics and Controls Engineer)
Henry Ruff (Electronics and Controls Engineer)
Center of Mass Report
Mario Ramirez (Systems Engineer)
Qui Du and I ran a center of mass simulation using Qui’s SolidWorks design, https://www.arxterra.com/spring-2016-rofi-mechanical-design-rev-2/. SolidWorks takes into account each hardware component of RoFi including the: mass, material, and dimensions. From this simulation, we achieved the following results.

Figure 1: Front View
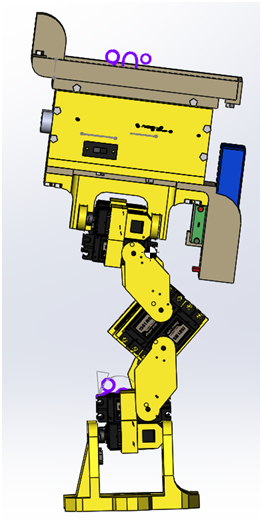
Figure 2: Side View
Figure 1 and Figure 2 shows RoFi in a neutral standing position with the center of mass being the black and white circle. Further research has led us to the conclusion that we want a lower center of mass to allow RoFi to easily traverse inclines and make sharp turns. A possible solution is to lower the batteries back down to the feet or lower the backpack for the batteries, however, we will not move the batteries to the feet per customer’s request. Further testing in SolidWorks shows that lowering the backpack will cause servos to hit, therefore, we have decided to keep the current center of mass. Our current model will lead to wider turns and more exaggerated movements while traversing over inclines.