{kind=link}
Spring 2016 RoFi: Torque Report
Christopher Andelin (Project Manager)
Mario Ramirez (Systems Engineer)
Qui Du (Manufacturing Engineer)
Andrew Laqui (Electronics and Controls Engineer)
Henry Ruff (Electronics and Controls Engineer)
Torque Report
Mario Ramirez (Systems Engineer)
Method
Image below is used for the purpose of identifying the servo location. This photo does not necessarily represent our group’s final product.

Image 1:Picture taken from Jonathan Dowell: http://www.projectbiped.com/prototypes/rofi/photos
Torque was calculated using the equation T=rFsin(theta). The distance between the servo and the end of the mass being moved (r) was calculated using a measuring tape. The range of motor was calculated using a protractor (theta) and the weight being moved was taken using a scale (F). Once the torque was calculated, it was compared to the stalling torque of the servo. The following 2 tables show the calculations and the comparison of the torque needed and the stalling torque.
Torque Calculations
The table below shows the amount of torque needed to move the mass connected to each servo. Numbers stated similar to 2.1 and 2.2 represent if the servo were to be moving the mass above or below it. The measurements and calculations were taken for both top and bottom to insure the customer that the servos could move both top and bottom mass if needed. The table represents the worst conditions (extreme case) for RoFi, this means, that the angle of all the lever arms in respect to their servos are at a 90 degree angle thus needing the most torque of any other position. The table shows that in a worst case scenario servos 1 and 7, the feet servos, will fail.

Table 1: Torque Calculations (If Things go Wrong)
The table below shows the calculations for RoFi under normal conditions. This table uses the max angle of RoFi’s lever arms based on his normal operation. If normal operation is maintained we can see from the table that each servo is capable of supplying enough torque to move its respective mass.
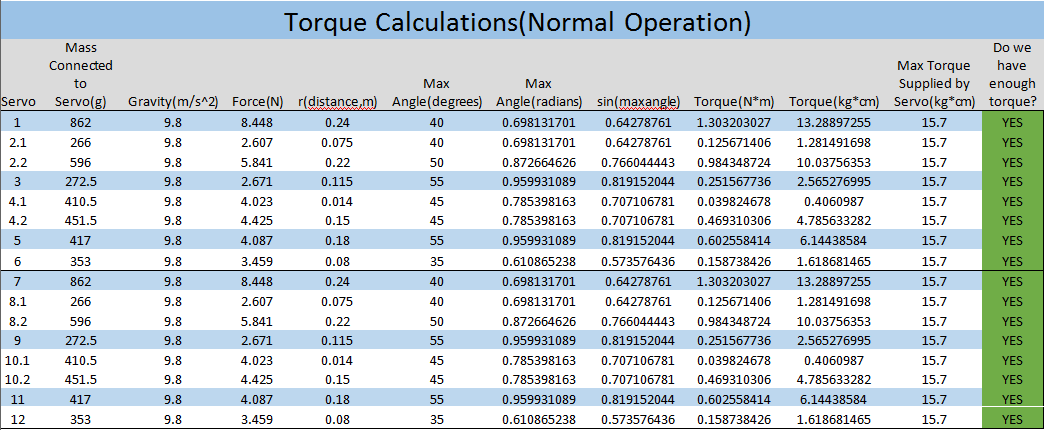
Table 2: Torque Calculations (Normal Conditions)