{kind=link}
Spring 2016 Velociraptor: Spring Experiment
By: Mingyu Seo (Manufacturing & Design Engineer)
Introduction:
After assembling the final prototype and testing the static walk, we’ve found the weight of the head and tail were straining the servos. We’ve decided to use a spring to support the weight, which lead us to perform a quick experiment to see how much the spring will help support the weight. A variety of miscellaneous items were use as mass to test the spring constants.
Procedure:

Figure 1. Experiment procedure
Figure 1. shows the experimental procedure to test the spring. We’ve added weight to see the extension of the spring, and to see how much the spring will be able to support with maximum of 300 grams due to our head and tail only weights 200 grams with the battery included.
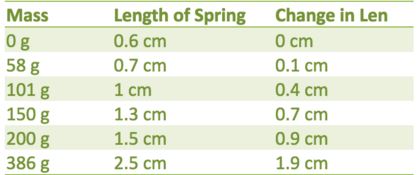
Figure 2. Experimental Data

Figure 3. Attached spring to the head of the robot.
Conclusion:
By adding a spring we were able to reduce majority of the stress applying to the servos. By removing the stress on the servos we also conclude that it reduces the power intake of the servos because the servos no longer hold the full weight of the head and tail. To see how much power is consume refer to the servo load test blog post.