{kind=link}
Spring 2018 3DoT Hexy: Decision on Motor Type Selection
By: Kris Osuna (Electronics and Control Engineer)
Verified by: Eduardo De La Cruz (Project Manager and Manufacturing Engineer)
Approved by: Miguel Garcia (Quality Assurance)
Introduction
The purpose of this blog post is to introduce the different types of motors that are at our disposal. We will compare and contrast each type of motor, and conclude the post with a final decision on which type of motors are best suited for our Spiderbot design.
Brushed DC Motor
Is used commercially in toys and also in industrial use. Inside are brushes that rub on a copper ring so that current goes through the coils as the motor spins while surrounded by positive and negative magnets.
Pros: Inexpensive and lightweight.
Cons: Very electrically noisy, needs extra circuits and connections for controlling, an difficult programming for small movements.

Figure 1: Brushed DC Motor
Brushless DC Motor
These motors are close to the brush motors except that they don’t make as much noise as them. These are use in fans, drones or multicopters.
Pros: Quiet
Cons: Needs extra connection and circuit to control the motor.
 Figure 2: Brushless DC Motor
Figure 2: Brushless DC Motor
Stepper Motors
Is a motor that moves in steps unlike the brushed and unbrushed DC motors. Since it moves in steps it has precision control. It is used in 3D printers, robotics and printers.
Pros: Precise repeatable positions, speed control, great low-speed torque and great ‘holding torque.’
Cons: Low efficiency, needs encoder for reference and needs extra circuit board to use on Arduino.
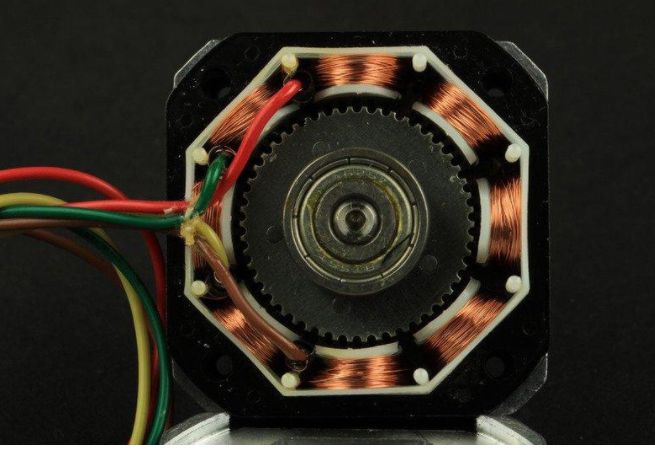
Figure 3: Stepper Motor
Servo Motors
Is a motor that uses negative feedback to control motor speed or position. They use very precise motion control. These are the most commonly used in electronics. Used for robotics, animatronics and electronic cars, boats or planes.
Pros: Low cost, variety and simple to control.
Cons: Limited range of motion goes from 0-180 degrees can become jittery if trying to hold a position.
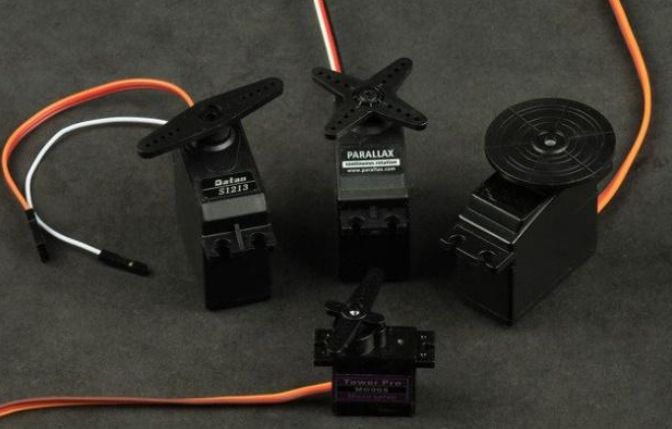 Figure 4: Servo Motors
Figure 4: Servo Motors
Continuous Rotation Servos
Are similar to the normal servo motors except that it has more mobility it can go 360 degrees and go in reverse. It contains a built in H bridge so no extra circuits were needed. Used in robot drive trains.
Pros: Inexpensive, small and easy to control
Cons: Not designed for large loads.
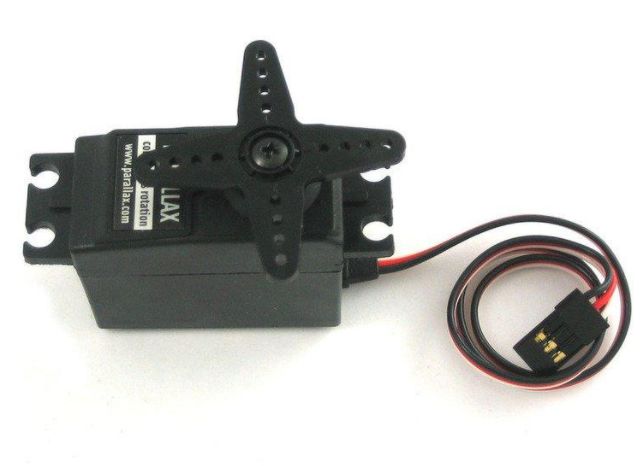 Figure 5: Continuous Rotation Servo Motor
Figure 5: Continuous Rotation Servo Motor
Final Decision
Micro-motors

Figure 6: Micro-motors
We decided to use a micro brushed motor for our design. This is due to 3DoT David using the same type of motor. Their motor trade off study shows we will use the 3.7V 50,000 RPM Small Colorless Motor 716. These motors are extremely cheap at $1.95 each compared to $10-20 for servo motors.
Resources
- https://learn.adafruit.com/adafruit-motor-selection-guide/dc-motors
- https://learn.adafruit.com/adafruit-motor-selection-guide/brushless-dc-motors
- https://learn.adafruit.com/adafruit-motor-selection-guide/rc-servos
- https://learn.adafruit.com/adafruit-motor-selection-guide/continuous-rotation-servos
- https://www.seeedstudio.com/37V-50000RPM-Small-Coreless-Motor-716-p-1884.html
- 3DoT David Motor Trade off
- https://learn.adafruit.com/adafruit-motor-selection-guide/stepper-motors