{kind=link}
Spring 2018 3DoT Hexy: Power Budget
By: Raymundo Lopez-Santiago (Mission, System, and Test)
Verified by: Eduardo De La Cruz (Project Manager and Manufacturing Engineer)
Approved by: Miguel Garcia (Quality Assurance)
Introduction
This blog post covers 3DoT Hexy’s power budget. 3DoT Hexy’s power budget was determined using the version 6.xx power budget template. The template has been filled out with max current drawn from each component obtained from datasheets. Values will be updated as soon as they are measured. There may be a possibility that we will not need a Texas Instruments boost converter to power our two micro metal motors at 5V. Further testing will be concluded before a decision is made. In the meanwhile, the boost converter was not included in this revision template.
The complete 3DoT Hexy power budget spreadsheet can be seen by clicking the following link: 3DoT Hexy Power Budget.
Update 04/17/18
After improving 3DoT Hexy’s gear system, a 5V boost converter will not be required for the project since the robot can operate efficiently at 3.6V.
Components used in the 3DoT Hexy robot include:
- (3) Light Sensor – Si1145
- (1) Ultrasonic Sensor – HC-SR04
- (1) I2C expander – PCA9544A
- (1) Gyroscope – ITG-3200
- (3) IR LEDs
- (2) Extra LEDs
- (2) Micro-Metal Motors – FIT0481
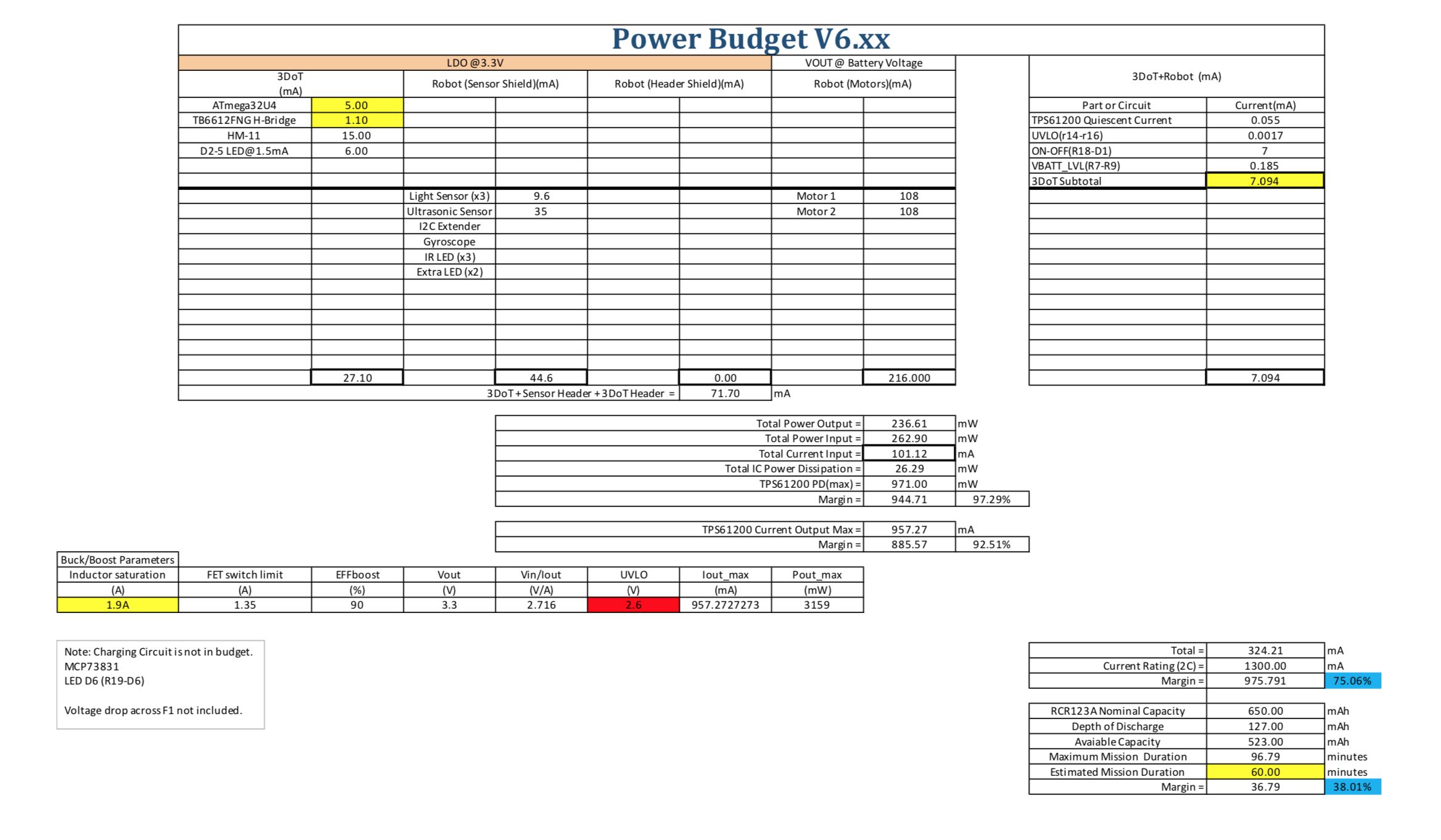 Fig. 1: 3DoT Hexy Project Power Budget
Fig. 1: 3DoT Hexy Project Power Budget
Conclusion
This blog post covers 3DoT Hexy’s power budget. See Fig. 1. One recommendation when using the template is to make sure values for current are in mA. Maximum mission duration is xx. Our estimated mission duration is xx minutes. There is enough margin to compensate for a few more minutes of operation.
References
- https://www.arxterra.com/2016-spring-3dot-david-final-project-blog-post/
- https://docs.google.com/spreadsheets/d/17oXC8C9Apr0KN9fGo3VRT38ZHFaBRNQnUWpWSYL1bdw/edit#gid=205608523
- https://drive.google.com/file/d/18xenQLRR–v6t-eWHHrI-9tyA8uVhRLa/view
- https://drive.google.com/drive/u/0/folders/1eoo7je4grnLRUqKFYUU2fdz6X-0pWykb