{kind=link}
Spring 2018 AT-ST Walk Code
By: Samuel K Yoo (Electronic & Control – Software)
Verified By: Intiser Kabir (Project Manager)
Approved By: Miguel Garcia (Quality Assurance)
Table of Contents
Introduction
During the creation of AT-ST, this is a program that allows AT-ST to walk. Note that this program is used for the current model and might need to be updated later on. The code is very straightforward as it only uses the motor and controls the speed. There are commented code for the servo to make it shift the weight of the bot.
Code
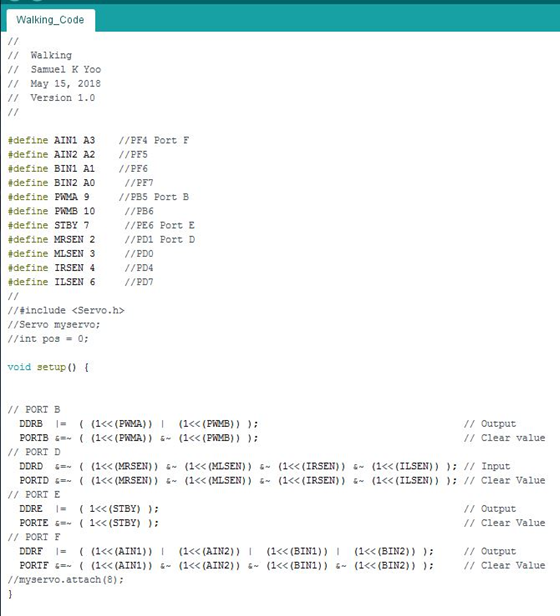
Figure 1: screenshot of code pt 1
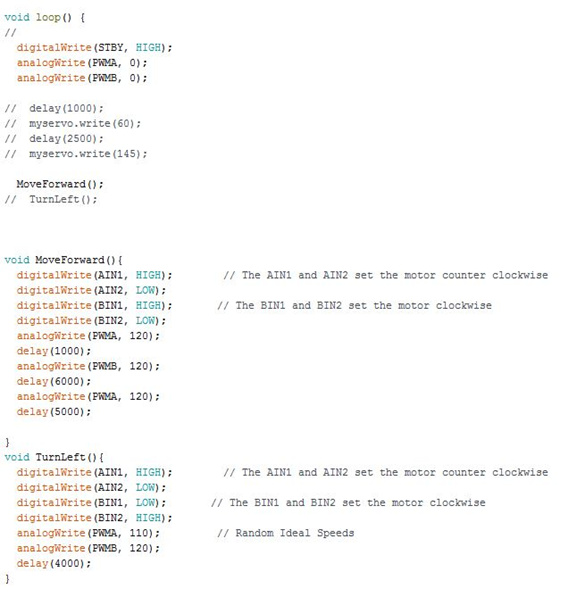
Figure 2: Walk Code pt 2
Explanation
This code should not be used in the future irritations of the AT-ST. The major explanation of why it should not be used it because of the code being adjusted with some physical deformities with the leg. If the future irritations are going toused this AT-ST, then the code should be used to make the robot walk. However, a more appropriate approach to creating a walking motion code is setting the AIN pins and BIN pins to clockwise and counterclockwise. Keep in mind if the robot is facing you, the left motor must spin counterclockwise and the right motor must spin clockwise. The AIN pins should be programmed to the right motor and BIN pins should be the same with the left motor. To program the motor for a motor driver this table should be used
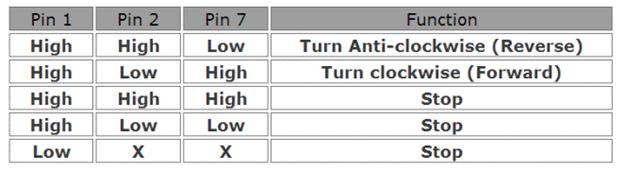
Figure 3: Table for motor control
The PWM should also be tested on each motor to determine what speed the motors are truely rotating at. This can be done with the shaft encoder, which I have not programmed with. There will be a link in the References for those who would want to learn how to program it.