{kind=link}
Spring 2018: Biped Action Code
By: Jorge Henandez (Electronics & Control)
Verified By: Miguel Gonzalez (Project Manager)
Approved By: Miguel Garcia (Quality Assurance)
At first we were given the task to complete a previous ROFI biped. Not knowing how many of the integration systems worked, research was required. Most of the wires were cut from ROFI so this process took around 1 and a half to 2 weeks to even get ROFI functional. Once an Arduino Mega and the shield provided from last semester were connected properly, along with the external power source, it was finally time to have ROFI moving.
Robot POSER, which is a beta robot poser provided from projectbiped.com, allows new action sequences and servo calibrations to be created for ROFI/ FOBO. The application controls the robot via a USB cable from the Arduino Mega (Uno for FOBO) to a laptop or desktop computer. The folder containing the application also has 3 actions (walk, static walk, and turn right) so you can get the robot moving once it is calibrated. To see us calibrate ROFI click here ROFI Calibration .
Similar steps were taken to get FOBO walking and used a FOBO servo centering program, provided from projectbiped.com, along with the FOBO poser to get our calibrations for each servo. Having our own unique calibrations, we saved a frame action which allowed us to bring Micro FOBO back to its center servos which are listed below.
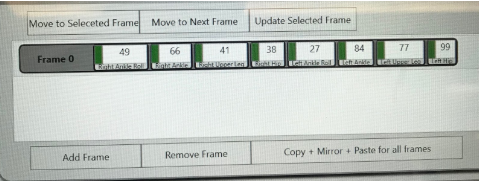
Fig.1 Action Frame Calibration
Walking Action:
The walking action looks like the following, which moved the servos in a walking motion for a continuous loop until asked by the user to stop.
Another action was loaded onto FOBO Poser to make the biped mimic walking. Below is the sequence of the frames as it controlled the servos in 10 frames to adjust it walking while maintaining its balance.
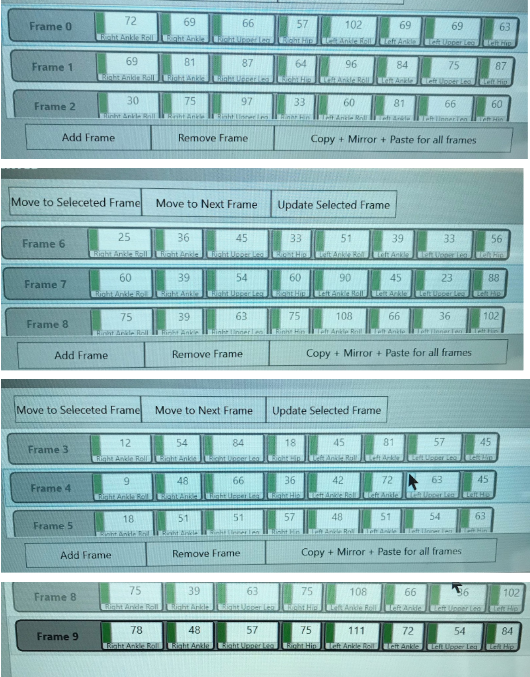
Fig.2 All Action Frames