Mini-Rosco/Spring/2020
Ultra Sonic Trade off Study
Author/s: Darren Chan & Alex Margaris
Introduction
Mini-Rosco needs to be able to locate an object so that it may implement it’s following algorithm. In order to accomplish this an ultra sonic was the decided method, and a trade-off study was done in order to determine an adequate device. Factors such as sensor distance and compatibility were taken into account.
Trade off Study
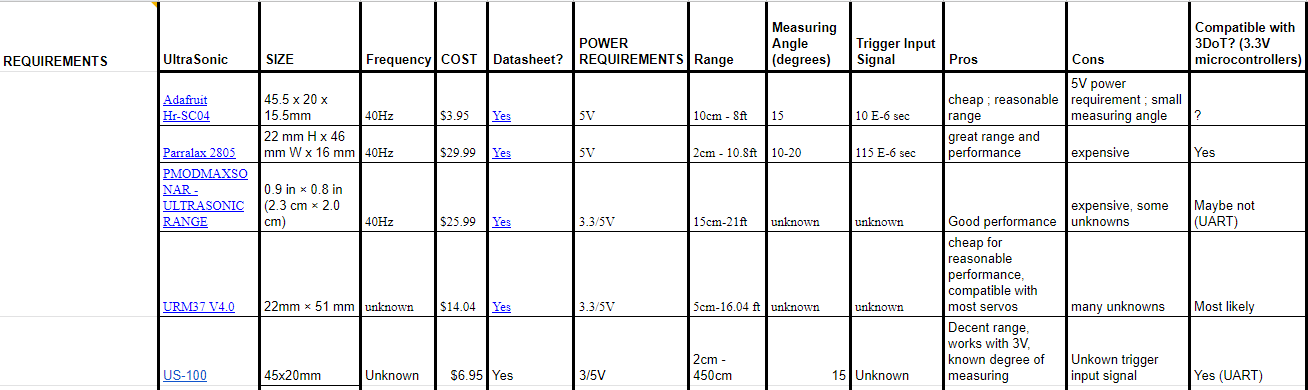
Figure 1: Ultrasonic Specs
Rosco needs an ultrasonic that will allow it to implement its following aspect with adequate accuracy and distance. One of the first requirements is the space requirement. As the ultrasonic needed to fit on Rosco, we could not have an exceedingly large device. However, this problem was remedies by developing a custom holder for the ultrasonic. Another major requirement of our ultrasonic was the distance in which it would be able to pick up an object. This was important as it was stated that the robot would follow within a range of one feet so the working distance could be no shorter than this given value. As most of the boards were able to pick up the distance with less than a foot working distance all the boards met the requirement. In the end the requirement that lead to the US-100 ultrasonic was the compatibility with the 3dot. As the board would not work without the 3dot, none of the 5 or 3.3 volt devices would prove adequate. This lead us to pick the US-100 which was compatible with a 3V supply. In addition, due to the use of only one ultrasonic, as multiple ultrasonic stand the risk of interfering with each other, the use of IC2 was changed to UART.