There are many different types of material we used to finish our final design. The body and the arms of our AdBot were made of aluminum of 0.125” thickness that we obtained from McMaster. The reason for using aluminum instead of plastic was the size of our body and we wanted a strong and reliable material—something that would not fall apart. It was impossible to 3D print the body of our AdBot. Our president Ryland had access to welding tools and drill press; he helped us put the body together and did a pretty good job with it and we ended up saving a lot of money. Our major concern after the body was put together was the weight. The body is strong but it is heavy.
For our 3D printing material, we went with ABS plastic because:
AdBot is a robot that can drives around campus in place of a person passing out flyers.
Dang Le (Project Manager, Electronics and Control) Don Tran (Mission, Systems, and Test) Muhammad Siddiqui (Manufacturing and Design)
Table of Contents
Executive Summary
Program Objective
The project objective is to build a rover that will simulate a flyer distributor advertising CSULB’s Eta Kappa Nu social, guest speaker, and technical events on campus. Using a single power source the rover will launch from, and return to, an HKN advertisement booth and run in a general high foot-traffic area on campus which consists of flat areas, sloping areas, and stair ways, as shown in the course map. The rover will be controlled remotely using a computer with internet connection. Negotiations of budget resulted in the rover to cost less than or equal to $250. There is to be expected 0 to 16 mph wind during the course run on May 13th (Reported in Weather Report) [1].
Mission Profile
The perimeter of the grass is 275 ft / 84 m. The north and south sides are leveled. The east side has 9 steps. The west end is a ramp.
Figure 1 Test Course
Level 1 Customer Requirements
1.1 AdBot shall travel at 4.55 ft/s at the pace of an individual delivering flyers.
1.2 AdBot shall follow CSULB Regulations for Activities and Advertising.
1.3 AdBot shall launch from the HKN booth and return.
1.4 AdBot shall operating with one power source.
1.5 AdBot shall be controlled remotely through Arxterra Control Panel.
1.6 AdBot shall go up nine steps of a staircase.
1.7 The budget shall be $250
1.8 AdBot shall protect its hardware from weather conditions on the day of the final.
Level 2 Requirements
1.1 AdBot shall turn at 84 rpm.
1.2 AdBot’s sign holder shall be within 3 ft.
1.3 The course shall be completed in 8 min.
1.4 AdBot’s current draw shall require 1000 mAh.
1.5 The Arxterra app can connect via bluetooth within 3 ft.
1.6 AdBot shall provide 25 kg-cm torque to straighten out.
1.6 The sign shall be 5.3 in. from the back of the chassis.
1.6 AdBot shall not bend at the motors or servos due to weight.
Design Solutions
Tracks instead of wheels make AdBot look military. They can drive over obstacles on the ground without getting stuck.
Prototyping
For the PDR, the chassis was built out of wood and 3D printed wheels. The 3D printed tracks had more tension in hopes that they do not fall off. The wheels had longer treads. AdBot was powered by battery. It moved with differential drive control and could drive forward, backwards, and turn. The tracks shifted on the wheels. The servos moved using an unsigned byte, slider from 0-90, custom command in Arxterra.
For the CDR, the chassis was built out of 6061 aluminum. The wheels were reprinted and prevent the tracks from undoing. The left side tracks moved together; the same goes for the right side.The motors were switched to higher torque ones and changed from 6 V to 12 V. Without a battery yet, AdBot was powered with a AC to DC wall adapter and wire. The geared motor to lift the arms was not finished.
Motor Driver Trade-Off Study
The Arduino pins supply less than 0.040 A. The solution to drive motors is to find motor drivers. The trade-off study is in this link here.
Motor Trade-Off Study and Torque Test
DC motors are commercially available and offer choices. The motors have gears that changes thousands of rpm into hundreds. The motors of interest offer more torque force with decreasing speeds. Several motors are purchased and tested as stores do not claim the torque information or stall current. This link link has information.
Experiments
AdBot was taken to lab equipment to measure the motor specifications. Free multimeters have a 0.020 A limit. The torque test apparatus was used on motors. 1K, 5K, 10K, and 20K potentiometers could not stall the motors. The motor shafts were held onto a bearing by a screw and the bearing was attached to a wheel. This was done in order to provide grip to cause stalling. More information is here .
Subsystem Design
PCB Design
The custom PCB is a shield that fits on top of the Arduino Uno. It contains motor drivers to supply current to five motors. It features an HC-06 bluetooth module. The layout and schematic are in these links here and here. We made a through-hole PCB, but had to remake it into surface mounted.
Arduino Software Code Design
The firmware folder has many files containing multiple functions. The commandDecoder receives information from the Arxterra app in the form of a command packet and authenticates it. It will then pass the data packet to commandHandler to distinguish out if this is a move operation or camera-related operation and whatnot. The Arduino code then passes the packet to a function that will work on it. move_TB6612FNG() receives a packet for driving. The code is in this link here.
Software Block Diagram
Interface Matrix Definitions and System Block Diagram
A system block diagram and interface matrix are available so that this project can be replicated. They show the components that are used and wire connections. AdBot’s interface matrix begins displaying all the Arduino Uno’s pins and names. Components are placed in columns. When an Arduino pin is not vacant anymore, the row turns white to indicate that the next component cannot place a jumper lead in the white box. The table and diagrams are in linked here.
Interface Matrix Definition
Hardware Design
There are many different types of material we used to finish our final design. We wanted to use strong and reliable materials. Material trade-off study is described in this page here.
Our project manager worked on the schematic and the manufacturing engineer put together the layout. One of the problems our manufacturing engineer faced while doing the layout was the positioning of the pins that will be connected directly to the Arduino Uno. Information about the custom PCB manufacturing is in this link.
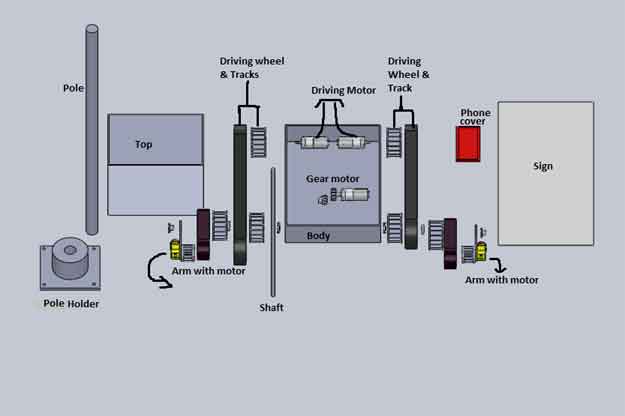
Start out with understanding the basic design of AdBot. It consists of a total of eight big wheels, eight tension wheels, four tracks, two gears, one wooden shaft, one wooden pole, one pole holder, and one flat top. The design for the wheels and tracks are from previous semester’s RoSco. I modified them so that they work for AdBot requirements. Details about designing in SolidWorks is here.
Verification and Validation
Verification Test Plans
AdBot’s performance depends on the test plan. These plans show the requirements were considered and are kept when constructing AdBot. The table is linked here.
Validation Test Plans
The customer looks at qualitative features of the product built. Validation tests are done on the day of the final demonstration. The table is linked here.
Project Status
Mass Budget
Knowing individual masses lets the manufacturers know what components or materials to take out or replace. The allocated mass is based on the overall masses to stall the drive motors.
Power Budget
Cost Budget
The construction of AdBot rover received a $250 budget. After the first few weeks, $100 was spent on breadboard parts and the chassis. The team has to keep track of our budget during the time building the project. Luckily we saved money and time on shipping due to our team purchasing Amazon prime. The project ended up with approximate $208 of spending—not including the PCB fabrication and SMD components. The cost of the end product is shown.
Project Schedule and Work Breakdown Structure
Project Libre was used to schedule the semester. The WBS illustrates the members’ duties in the schedule and pace to complete those. The depictions are shown
The burndown line will not reach zero in software.
Project Demonstration
Concluding Thoughts
AdBot is designed after a tank, and it is built from the ground up on a $250 budget. We ordered several parts from China to save several dollars. This mistake delayed our project for the CDR presentation. We spent a lot of our money during the design phase too on tools and parts to learn to use. With four weeks left and no electronics engineer to make a new schematic, the systems engineer, manufacturing engineer, and I worked extra overtime. The systems engineer had a difficult time writing and troubleshooting his C++ functions that receives commands from the Arxterra application. I was busy a lot in the project, because having one person working on manufacturing is not enough. Construction requires multiple heads to check, cut, drill, and build correctly. Everyone worked on software and tasks almost everyday for months.
The front motors at the end of the arms on AdBot are heavy. It places enough tension on the shaft to shake the servo around, which is screwed onto brackets. In this situation, the president helped us mount the servo securely. To make AdBot better, we should move the motors inside the chassis to drive the four front wheels. The tracks are too long to print on certain machines. The printed tracks took a long time to work on, but after printing, they do not come out as expected. On the final, we used metal tracks.
Resource Files
The system and software block diagrams are created using the full version of Shapes.
The PCB schematic for AdBot, made by the project manager, in figure 1 shows pin allocations with the integrated circuit components and the Arduino Uno.
Schematic page 2
Figure 2. L298P motor driver.
The first L298P half bridge is the surface mount PowerSO20 component, which is not the Multiwatt15 breadboarding type so the pins read differently. The sense pins are grounded. They are not connected to 0.5 ohm 2 watt resistors for measuring the voltage and current draw. The device is manufactured with two no connection terminals. Vs requires inputing the power source, which is a 12 V battery. Vss is for inputing 5 V to keep power for logic.
Figure 2. L298P number 2.
Figure 3. L298P number 3.
Figure 4. Arduino Uno pins 8 and higher.
The above image shows the header connection to the Arduino and the roles some pins are designed to have. Each half bridge has runs two motors, so they have a total of four input and two enable pins to connect to the arduino. JHIGH refers to pin number 8 up to SCL.
Figure 5. Arduino Pins 1 to 7.
The above image shows the the remaining pins. JLOW represents Arduino pin number 1 to 7. The voltage divider connections to the bluetooth module. Analog pins are used to write digital highs and lows to the motor driver just as digital pins are capable of doing.
The project manager worked on soldering and troubleshooting the PCB board. He measured and tested the board for problems.
By Muhammad Maqbool (Manufacturing and Design)
Dang Le (Project Manager)
PCB layout was one of the hardest tasks to complete. We were left with no schematic. Our project manager worked on the schematic and the manufacturing engineer put together the layout. One of the problems our manufacturing engineer faced while doing the layout was the positioning of the pins that will be connected directly to the Arduino Uno. The dimensions for the pin placement were found online while keeping in mind the distance between Jlow and Analog should be 1.9”. The motors are placed on the right edge of the board so it is easy to connect or disconnect wires. All the capacitors are placed on the bottom right of the board so it is easy to put the components when the PCB arrives. We were not sure about the placement of the half bridges so the manufacturing engineer double checked it with the president and we ended up placing it between the pins that will be connected to the Arduino. They are kept close to the power source. For routing first I made a power bus of 0.18” and dragged it all the way down and then manually routed all the components that will be getting direct power from it. All the remaining wires are 0.016” thick. Source
Start out with understanding the basic design of AdBot. It consists of a total of eight big wheels, eight tension wheels, four tracks, two gears, one wooden shaft, one wooden pole, one pole holder, and one flat top. The design for the wheels and tracks are from previous semester’s RoSco. I modified them so that they work for AdBot requirements. The tracks are metal in the final design.
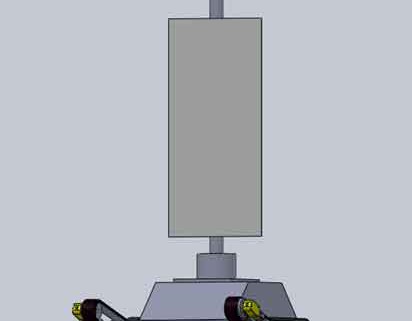
Figure 1. Model front profile.
Figure 2. Chassis holes for the motors.
Figure 2 shows the body of AdBot and the dimensions are 12x8x2 inches with a thickness of 0.125 inch. The holes on the back side provide a path for the motor shaft to attach to the wheels directly. The holes have a diameter of 0.160 inch, which was measured using a Vernier caliper.
The diameters of the front side holes are 0.250 inch. They are openings for the shaft, which connects with arms and free-spinning wheels. The shaft has a thickness of 8mm.
Figure 3. Arm turning gear.
Figure 4. Servo gear.
Figure 3 shows the gear I designed for the shaft. The inner radius is kept to 8.5mm so that it sits on the shaft. I use a setscrew to screw the gear on the shaft to make sure it does not move from its position. Figure 4 shows the gear design for the servo and it is screwed directly on the servo arm. The two gears are kept close to each other so their teeth can overlap. When the gear on the servo moves, it moves the shaft gear with it, hence moving the arms up or down.
Figure 5. 3D track model.
Tracks are one of the most difficult objects to be printed. The tracks around the arms have a diameter of 4.9 inches. The tracks in the back have a diameter of 9”. To increase the size of the tracks from 4.9” to 9” I increase the circular pattern in the SolidWorks file and then increase the length of the tracks while keeping in mind the gap between each loop, because the gap actually makes the track stretch when it is 3D printed. The problems I faced while printing the tracks was that the 9” tracks has more weight compare to the 4.9” tracks so they hang from the wheel rather than sit tight on the wheels.
Figure 6. Wheels.
All the wheels on our AdBot have a diameter of 2.5” with a thickness of 0.7”. The two wheels in the back connect directly to the motor shaft with mount couplings. There are four free spinning wheels on the shaft in the front (two wheels on each side) and one wheel on each arm.
Figure 7. Aluminum arm model.
AdBot comprises two arms, one on each side. The hole in the back is cut so it can fit onto the 8mm shaft and the hole in the front provides path for the motor shaft to connect directly onto the wheel. The arms are made of aluminum. The dimensions I chose are 6×1” with a thickness of 0.125”. I used a drill press to make perfectly aligned holes on the arms.
Figure 8. Tension wheels
AdBot has eight total tension wheels. The purpose of tension wheels is to make sure the tracks do not slide off the wheels as experienced by RoSco. The diameter of the wheel is set to 1.5” so it could weigh less and I kept an empty space in between so the tracks can sit on it perfectly.
Figure 9. Exploded view of AdBot components.
Conclusion:
The most difficult part for the 3D design in SolidWorks was the tracks. The design was complex and hard to understand. The tracks did not come out as I expected. 3D printing in general is difficult as the parts do not meet your expectations.
Experiments
AdBot was taken to lab equipment to measure the motor specifications. Some multimeters have a 0.020 A limit. The torque test apparatus was used on motors. 1K, 5K, 10K, and 20K potentiometers could not stall the motors. The motor shafts were held onto a bearing by a screw and the bearing was attached to a wheel. This was done in order to provide grip to cause stalling.
Figure Torque Test Apparatus
Figure Stalling a motor attached to a free running motor by grip
Figure Measuring no load current
Figure Stalling the motor manually
The wheel torque equation is shown above as the force perpendicular to the wheel radius. To test the wheel torques, use the corresponding formula. Attach a mass to one motor. Apply the rated voltage to the motor and measure the height and count the number of revolutions. The data for torque data and constant current draw are shown here.
How to calculate the force of the wind
Start with a conservation of momentum model.
p = pressure (Pa)
rho= density (kg/m3)
v = velocity (m/s)
x = distance (m)
p = static pressure, Ps = 0
(rho*v^2)/2 = dynamic pressure, Pd
c = total pressure
rho_air = 1.225 kg/m3
vw= 17.9 mph
The wind force is the product of dynamic pressure and surface area of an obstacle.
F_w = P_d * A_s
Fw= wind force (N)
Pd= dynamic pressure (Pa)
A_s= surface area (m2)
As AdBot is about to tip over, it loses full contact with the ground, except at one point. AdBot balances on this point and does not collapse left or right. Thus, the sum of the moments about this pivot is zero. The calculation to find where to put the beam on AdBot’s chassis is as follows.
Mw = moments (N*m) due to wind force on objects (wind against phone, sign, and beam)
MO = moments due to objects (phone and beam)
MO = moment due to AdBot’s chassis
Fw,x or y = wind force in the x- or y-direction relative to the earth (N)
xx = horizontal distance (m), which is parallel to earth, beginning from the single pivot point
Fy = object weight (N)
9.8 = gravitational acceleration (m/s2)
Fch= chassis weight (N)
alpha= tilt angle (°)
xch= half-chassis length (m), a.k.a. chassis center of mass
m = mass
A = object’s surface area
l = object’s location of center of mass along the beam
alpha = tilt angle
z = distance from the chassis’s edge to the beam’s base making M_summation = 0
When M_summation is negative, the direction of rotation is clockwise relative to the three-axes drawn, and AdBot lands upright.
Figure Wind force calculation setup
https://www.arxterra.com/wp-content/uploads/2016/05/Test.png72107ROSCO_SPRING2016/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngROSCO_SPRING20162016-05-13 19:37:192018-03-13 21:31:24Spring 2016 AdBot Stall Current Test
By Don T. (Mission, Systems, and Test)
Dang Le (Project Manger)
Motor Driver Trade-Off Study
The Arduino pins supply less than 0.040 A. The small Pololu motors with 120:1 or 200:1 gear ratio run on 0.120 mA and more. The result is to find motor drivers.
The motor drivers’ specification of interest are tabled. The integrated circuit selected is the L298N. It is feared that the L298N is not powerful enough. It works fine so far. The L6203 has built in diodes despite it can drive only one motor per device. The L298N needs external diode bridges. Get motor drivers with the diodes built in.
Motor Trade-Off Study (and Torque Information)
DC motors are commercially available and offer choices. The motors have gears that changes thousands of rpm into hundreds. The motors of interest offer more torque force with decreasing speeds. Several motors are purchased and tested as stores do not claim the torque information or stall current. The requirement calls for a motor with 84 rpm or more. The 6 V motors have a no load speed of 85 rpm. The torque of 5.4 kg-cm meant that the motors stall at 5.4/3.175 (for 2.5 inch diameter wheels) or 1.7 kg of force, which is 3.75 pounds. The mass of the 6061 aluminum chassis is and arms is 1.108 kg. This figure without the motors and other components added is close to the full load specification of the motor. Instead a 12 V motor is used in its place. The design has front and back motors. The front motors have 9.2 kg-cm and the back motors have 5.4 kg-cm. 25 kg-cm of torque is required to lift the front of a 3.75 lb. rover over a 11-cm step of a staircase.
https://www.arxterra.com/wp-content/uploads/2016/05/2016-05-09-12_36_12-Edit-Post-‹-Arxterra-—-WordPress.png7272ROSCO_SPRING2016/wp-content/uploads/2013/04/Arxterra-Logo-340x156.pngROSCO_SPRING20162016-05-09 19:19:182018-03-13 21:31:24Spring 2016 AdBot Motor Driver Trade-Off Studies
By Don T. (Mission, Systems, and Test)
Dang Le (Project Manager)
The software block diagram shows the order that the firmware handles data and calls main functions.
Figure 1 Software Block Diagram
Software/Firmware Design Details
In the arxrobot_firmware tab, edit just #define project TRUE. The loop() function basically calls commandDecoder(). The command tab is where the commandDecoder() function is written. It checks a command packet (several bytes of information from the Arxterra app for each kind of AdBot activity) if it is correct. It usually is; Editing the firmware does not require using CoolTerm and finding LRC byte. When the packet passes this decode checkpoint, the commandHandler() is called. This function determines what kind of operation the packet does. The packet could be for controlling a motor or moving a servo. Scroll down in the pinouts_robot tab and a list of robot operations are shown. Next to each operation is a hex value, which is equivalent to the packet’s third byte, which usually is thought of as data[2]. When the firmware is loaded onto the Arduino Uno, and the Arxterra app sends a packet to the Arduino Uno, the firmware looks at data[2], looks up the operation name in the pinouts tab, and finds in the command tab what function the operation name calls. These functions for example are move_TB6612FNG() and move_servo() and they are located in any of the available tabs. Arduino scripts that are moved to subfolders within the arxrobot_firmware folder are no longer part of the firmware code and will not load onto the Arduino Uno or show up when the arxrobot_firmware scripts open. Note: Arduino understands the compound addition operator “A += B” as a shortcut of writing, A = A + B.
AdBot Pinouts
The AdB1 tab contains functions to run the DC drive motors. The pinout connections the Arduino recognizes is listed below.
Motor Front Left
const int aIn1 = 2;
const int aIn2 = 4;
const int aPWM = 3;
Motor Front Right
const int bIn1 = 7;
const int bIn2 = 6;
const int bPWM = 5;
Motor Back Left
const int cIn1 = 8;
const int cIn2 = 9;
const int cPWM = 10;
Motor Back Right
const int dIn1 = 13;
const int dIn2 = 12;
const int dPWM = 11;
Servo
const int SERVO_1 = A0;
move_TB6612FNG and run_TB6612FNG functions
An L298 half bridges has two channels to control two motors separately. With each channel, Arduino connects to a first input pin (C), a second input pin (D), and an enable pin (Ven). When the enable pin is written to low, the corresponding motor is free running. When the enable pin is written to high, the motor can move forward, move backwards, or stop.
Resource Files
The software block diagram is created using the full version of Shapes.
By Don T. (Mission, Systems, and Test)
Dang Le (Project Manager)
A system block diagram and interface matrix allow people to replicate the project. They show the components that are used and wire connections. AdBot’s interface matrix begins displaying all the Arduino Uno’s pins and names. Components are placed in columns. When an Arduino pin is not vacant anymore, the row turns white to indicate that the next component cannot place a jumper lead in the white box.
The Rover should travel on level area, ramp area, and stair ways during the mission test.
Critical Design Review
By Dang Le, Project Manager
Dang Le (Project Manager)
Don Tran (System Engineer)
Muhammad Ali Siddiqui (Electronic Engineer)
Muhammad Maqbool (Manufacturing Engineer)
Executive Summary
Program Objective/Mission Profile
Program Objective
The project objective is to build a rover that will simulate a flyer distributor advertising CSULB’s Eta Kappa Nu social, guest speaker, and technical events on campus. Using a single power source the rover will launch from, and return to, an HKN advertisement booth and run in a general high foot-traffic area on campus which consists of flat areas, sloping areas, and stair ways, as shown in the course map. The rover will be controlled remotely using a computer with internet connection. Negotiations of budget resulted in the rover to cost less than or equal to $250. There is to be expected 0 to 16 mph wind during the course run on May 13th (Reported in Weather Report).
Mission Profile
The total distance is approximated in 344fts. The perimeter of the grass is 275 ft / 84 m. The north and south sides are leveled. The east side has 9 steps. The west end is a ramp.
The front of USU building
The Design
The main component in our rover design are including
Four drive motors (2 on the front and 2 on the back).
One gearbox motor (for the center).
Six wheels and tracks.
Two arms with supported by horizontal shaft and gear.
Pole holder for advertising and smart phone.
Project Features
Rover with advertising sign will be traveled up stairs and slope area in front of USU building.
Rover will be run and return to HKN advertisement booth in a single charge.
One shaft with high torque gear box motor to support the lifting arms weight during the stair climbing.
Operator will be controlled remotely using Arxterra application with computer wifi connection.
Innovative wheels design to have a better track grip.
New aerodynamic body design to reduce weight and wind resistance
Custom PCB Design
Fritzing diagram circuit with three H-bridge and I2C protocol IC to drive five motors with using Arduino and firmware coding.
Fritzing Diagram
Breadboard testing transmit and received data with using H-bridge IC circuit and Arduino coding.
PCB layout
Hardware Design
By Muhammad Maqbool, Manufacturing Engineer
The body of our AdBot is set to be 12” x 8” x 2”. The Body is made of Aluminum. I got separate sheets of Aluminum each with a thickness of 0.125 inch and I welded them together with the help Ryland Walts. The reason for choosing Aluminum is that for our AdBot we wanted a strong body that would not get damaged if our AdBot hits the stairs or anyone try to kick it.
The body consist of two holes in the back each of a diameter of 0.16 inches, the holes provide a path for the driving motors to directly connect with the wheel. The two holes in the front of the body provides a path for the shaft to pass through and will be connected to the free moving wheels and arms.
The wheels are printed using ABS plastic. ABS plastic is the most cost effective material. Each Wheel has a diameter of 2.5 inches and a thickness of 0.7 inch. The arms of the our AdBot will be of Aluminum as wheel, the arms will be 6” x 1” with a thickness of 0.125 inch. We have two motors in the front of the arm that will be driving the front wheels at all times. I have designed the gear for the shaft and the motor myself. As the motor rotates the gear on it rotates with it hence rotating the gear on the shaft and lifting the arms. I have designed two arm holder myself that will hold the arm on the shaft at all times.
The top of our AdBot is more aerodynamic by adding curves to it so it can go fast. The top is 12” x 8” and will sit on the body and I will screw them both. I will design a pole holder that will hold our pole hence holding our sign.
Software Design
Test code for controlling motors with Arxterra Application
Project Update
By Dang Le, Project Manager
Work Breakdown Structure (WBS)
As a project manager, who created and assigned tasks for each member within the team throughout the project. A work breakdown structure (WBS) that showed each of team member who had responsible for their tasks. There could be a change during the mission task depend who has more free time and ability to take workload from other member. Here is our delegation tasks that showed in display below.
Budget Report updated
As a Project manager, I have to keep track on our budget to make sure it still within our given budget. The most expense is on prototype component and chassis. Unfortunately, our rover were bigger compare to previous semester, thus we have to look for the difference type of tracks that can support our rover during the mission test course. First, we thought we could use 6V DC motor for our rover ( these motor are free from previous semester), but now due to the rover is too heavy and may not be able to travel on stair ways and long distance, so we may replaced with 12V DC motor for final demo. Our budget report with expected cost right now without five of 12 V DC motors is $220.44.
Schedule Updated
Project schedule is the software that used to create a task schedule and plan in this project for a specific date to be completed. As the project moved on, we could see which tasks we were completed or behind the schedule. The schedule showed in green check mark that indicated these tasks were completed. However, the main concern was the PCB schematic and PCB wiring layout. We have built a new schematic, which more complicated than our thought due to more parts on PCB and not enough clearance between one trace to another, thus our team member were having so much trouble when doing the layout. Furthermore, we were down by one of our team member electronic engineer. Thus, we were behind the schedule as our planned. Another issue was main tracks for our rover. The current track we have as the same last semester that was not support enough for our rover during the mission test. We are still looking for the tank track and 12 V DC motor with high torque for our AdBot.
Status and Percent Complete
Here is the status and percent burn down as we move along until this time. The charts showed that we were behind on software coding, PCB layout, and hardware as well.
Project Demonstrations
click the link below to watch the AdBot demonstration